
资料下载


机电一体化实验平台技术的实训实验和运动控制与数控系统实验详细概述
hanxing011
分享资料个
机电一体化实验平台是机电一体化技术和测试技术的有机结合,系统集成了电机驱动技术,运动控制技术,计算机控制等。主要用于各大、中专院校开设的”机电一体化”“传感器原理”“自动检测技术”“运动控制技术”等课程的实验教学。
本实验指导书包含的实验内容包括以下的几个部分:
第一部分为实训实验,主要包括交流伺服控制系统实训与故障诊断实验,直流伺服控制系统实训与故障诊断实验,步进控制系统实训与故障诊断实验,变频控制系统实训与故障诊断实验。
第二部分为运动控制与数控系统实验,主要包括单轴电机运动控制实验,二维插补原理及实现实验,丝杠反向间隙实验,数控代码编程实验。
运动控制起源于早期的伺服控制,简单地说,运动控制就是对机械理运动部件的位置、速度等进行实时的控制,使其按照预期的轨迹和规定的运动参数(如速度、加速度参数等)完成相应的动作。
实际应用中,运动控制系统是由运动控制器、功率放大驱动器、伺服电机、起反馈作用的传感器、加上一些传动机械系统部件组成。
运动控制器是以中央逻辑控制单元为核心、以传感器为信号元件,以电机/动力装置和执行单元为控制对象的一种控制装置,运动控制系统通常有开环控制和闭环控制两种形式。
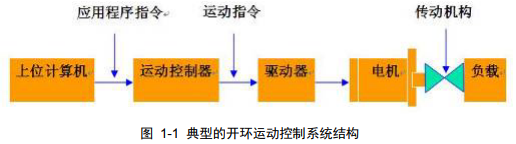
如图 1-1 所示,为开环运动控制系统的典型构成。在开环控制系统中,系统的输出量对控制作用没有影响,既不需要对输出量进行测量,也不需要将输出量反馈到系统的输入端与输入量进行比较。采用步进电机的位置控制系统就是开环控制系统的例子。步进驱动与控制器只是按照指令位置运动,不必对输出信号(即实际位置)进行测量。
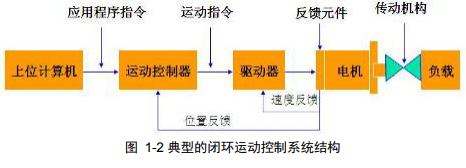
在闭环控制系统中,作为输入信号与反馈信号之差的作用误差信号被传送到控制器,以便减小误差,并且使系统的输出达到希望的值。闭环控制系统的优点是采用了反馈,因而使系统的响应对外部干扰和内部系统的参数变化均不敏感。这样,对于给定的控制对象,有可能采用不太精密且成本较低的元件构成精确的控制系统,采用交流伺服电机的位置控制系统(如图 1-2 所示)就是闭环控制系统的一个例子,安装在电机轴上的编码器不断检测电机轴的实际位置(输出量),并反馈回伺服驱动器与参考输入位置进行比较,PID 调节器根据位置误差信号,控制电机正转或反转,从而将电机位置保持在希望的参考位置上。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






