

基于微控制器实现无传感器BLDC电机平顺快速启动的设计浅析
工业控制
描述
低噪音且高耐用性的无刷直流电机广泛用于许多领域,包含工业应用、汽车及家庭。本文说明借由使用微控制器侦测转子初始位置以进行电机控制的方法,对此等电机的控制非常有帮助。此方法解决许多容易发生在无传感器电机上的各种问题,借由平顺且快速的高扭力启动,实现极致高效系统。
使用无刷直流电机时,设计师有多种控制原则可选择。为保持低成本,通常会省略检测转子位置的传感器(无传感器原则),而采用另一种方法,例如根据电机的反电动势预估位置。但此无法提供电机停止时的转子位置信息,因此无法依据转子位置在启动时控制电机,故可能因启动时非必要的反向旋转等情况,而导致效率降低。纳入初始位置检测功能即可解决此等问题(图1)。
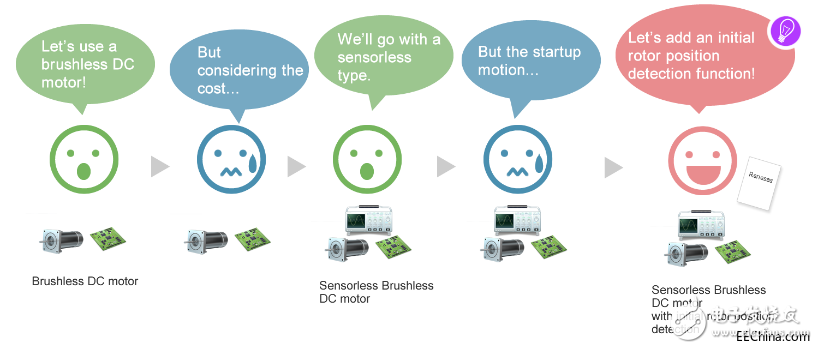
图1、考虑无传感器无刷直流电机
本文说明能有效控制无传感器无刷直流电机的初始转子位置检测,透过使用控制电机的微控制器,实现此初始位置检测。借由应用本文所述的方法,可实现无传感器、平顺、快速且高扭力的启动。此技术对于电动工具、输送设备、机器人、水泵、鼓风机等的开发非常有效。
解决容易发生在无传感器电机上的启动问题
图2说明无刷直流电机控制中初始转子位置的定位技术。
可利用如120度传导法(梯形控制)或矢量法(正弦控制)等进行三相无刷直流电机控制。120度传导法每60度切换一次三相激磁模式,在线圈的磁通量与转子永久磁铁之间产生扭力。此方法相当易于实施,因此被广泛使用。另一方面,矢量法将电机的电流值分成精确控制的扭力分量及磁场分量,因而大范围的实现从低速到高速的高效率控制,但此法需要复杂的算术处理,会增加CPU的负荷。
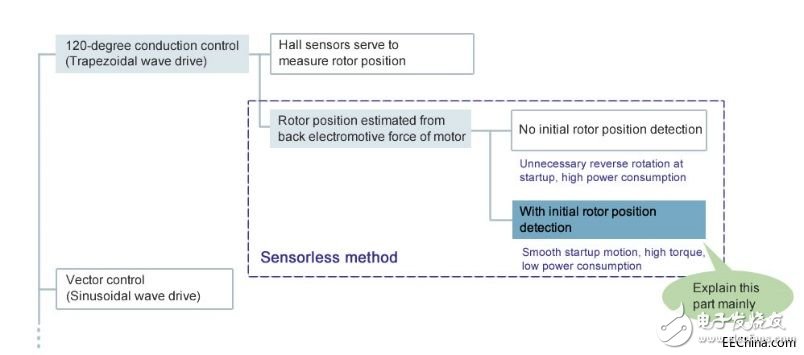
图2、应用于无刷直流电机的技术
不论是120度传导法或矢量法,针对转子位置检测都有感测及无传感器的解决方案。本文仅着重于120度传导法。霍尔传感器(磁性传感器)通常用于使用120度传导法的感检测系统,但这会增加系统成本,而且霍尔传感器也有不耐热的缺点。
另一方法,无传感器系统依赖各种与电机旋转有关的现象例如产生的反电动势,以预估转子位置。但这会阻碍电机停止时的转子位置检测,因此无法在电机启动时,根据转子位置进行正确的控制。当应用程序的启动行为没有问题时,可忽略转子位置并执行强制启动,但在以下情况中则不适合:
- 应避免启动期间非必要的反向旋转,
- 需要快速且平顺的启动,
- 应保持启动时低电流消耗。
在这些情况下,必须检测初始转子位置以进行适当控制。
整合无传感器电机控制需要的所有功能
在详细说明实施无传感器初始转子位置检测前,本文将先就设计用于电机控制的微控制器-瑞萨RL78/G1F微控制器(以下称G1F)做说明。本产品为瑞萨电子低阶微控制器RL78系列的一部分(参见图3)。此系列中,G1F属于“一般用途”子类(G1x),且包含使RL78/G1F适合电机控制应用的专门特性组合。RL78/G1F与电机控制应用有关的部分功能包括:
- 用于电机控制的Timer,支持64MHz芯片上振荡器频率,
- 附DAC的高速比较器,用于参考电压,
- 高电压转换速率可编程增益放大器 (PGA),
- A/D转换器等。
利用G1F的周边功能实施无传感器120度传导控制的威廉希尔官方网站 配置如图4所示。16位Timer(Timer RD)产生逆变器控制所需的三相补偿PWM讯号。基于安全考虑,利用可编程增益放大器(PGA)及比较器(CMP0)检测过电流,故可强制关闭PWM讯号,无需CPU介入。
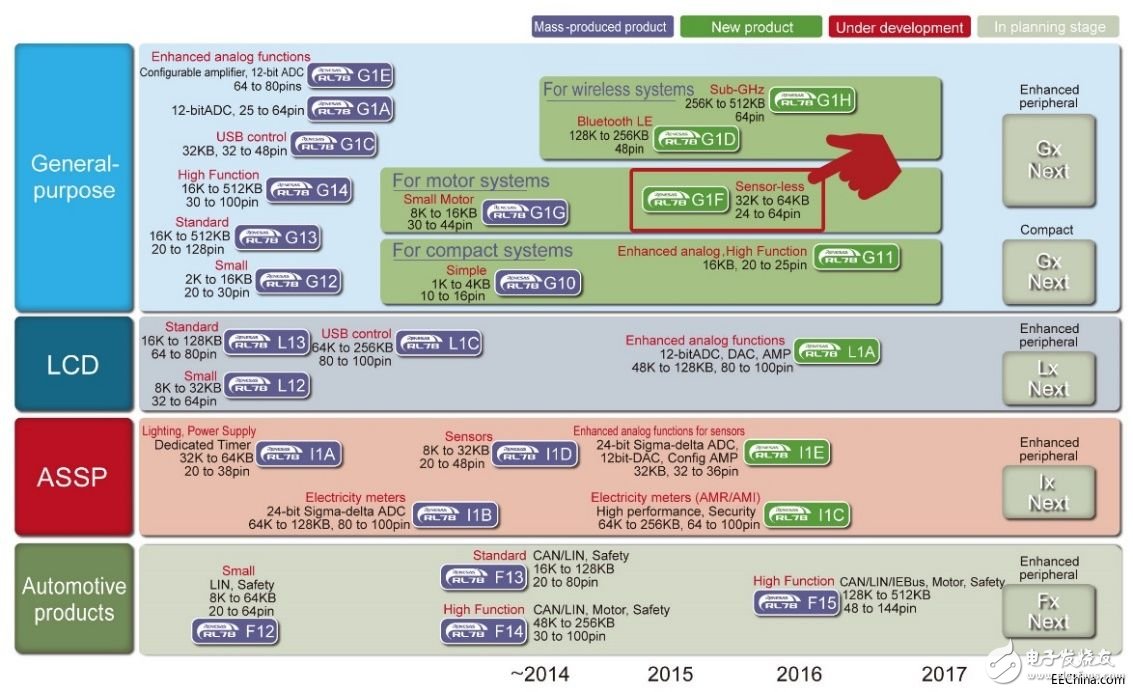
图3、RL78系列规划
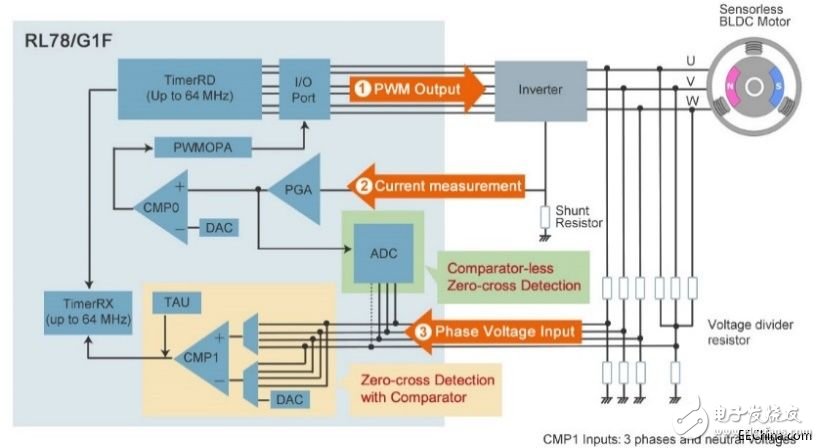
图4、无传感器120度传导控制之威廉希尔官方网站 配置
利用可选择的4输入比较器(CMP1)及具有输入撷取(捕获)功能的Timer(Timer RX),检测初始转子位置。开始旋转且可取得反电动势后,可利用通过零点 (zero-cross) 检测,决定转子位置。以三相中性点输入为基准,比较器进行通过零点检测。或者亦可利用10位A/D转器(ADC)取得数值并进行通过零点检测。使用比较器的第一种方法适合高准确度及高速度操作,而使用A/D转换器的第二种方法(无比较器)较适合中/低速应用。
结合两种处理步骤以缩短检测时间
无传感器初始转子位置检测包含以下两个处理步骤。
步骤1:在180度以内的位置检测
步骤2:极性检测
步骤1系以三相电机端子之间的电感会因转子位置(变化)而有所不同的事实(参见图8)。电感差异会影响下游端子(此例中即为MCU或示波器)的电压上升行为,而此为检测的基础。此步骤决定磁铁沿三个相位(U、V及W)之一的方向,但尚未决定极性(北或南),因为相同的变化会在整个360度电气角度范围内重复两个周期。
而步骤2采用的事实则是电机永久磁铁产生的磁通量与电流通过线圈产生的磁通量之影响会导致线圈铁芯材料磁饱和,而使电流更容易流动。因此能识别永久磁铁的磁极方向。结合步骤1和步骤2的结果,即可检测整个360度范围内的转子位置。
不同的电机类型会有一定的差异,但处理步骤1时的目标电流非常小,且量测只需要几毫秒的时间。相对而言,步骤2则要应付相对较大的电流,且量测时间则增长约100倍。
实际上,即使只对三相执行处理步骤2(三次),仍能以60度的分辨率检测到转子的初始位置。但此牵涉到较长的处理时间而且必须面对较高的电流。故本文所述之解决方案旨在借由整合处理步骤1和2,实现更高的效率。
处理步骤1:借由比较相位之间的电压上升行为进行评估
180度以内的位置检测程序说明如下。使用的G1F周边功能配置如图5所示。
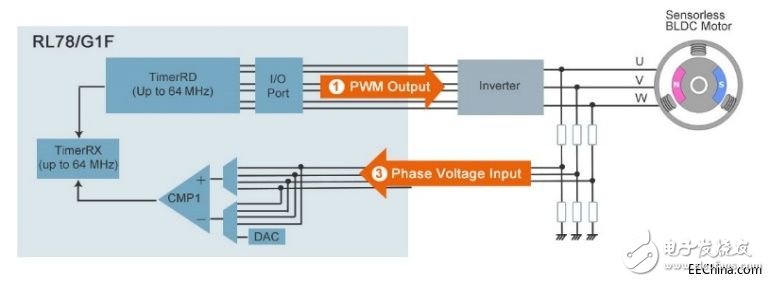
图5、处理步骤1威廉希尔官方网站 配置(180度以内之位置检测)
首先,在U相上施加电源电压,并量测V相电压 (VUV) 达到门坎(槛)参考电压 (VREF1) 时经过的时间。此程序的操作原理如图6所示。将VUV及VREF1相电压检测输入传送至比较器 (CMP1) 进行匹配检测,并利用Timer RX的计数器值决定当VUV与VREF1相符的时间。Timer RX开始计数,与Timer RD的PWM输出同步,并与CMP1同步捕获计数值。
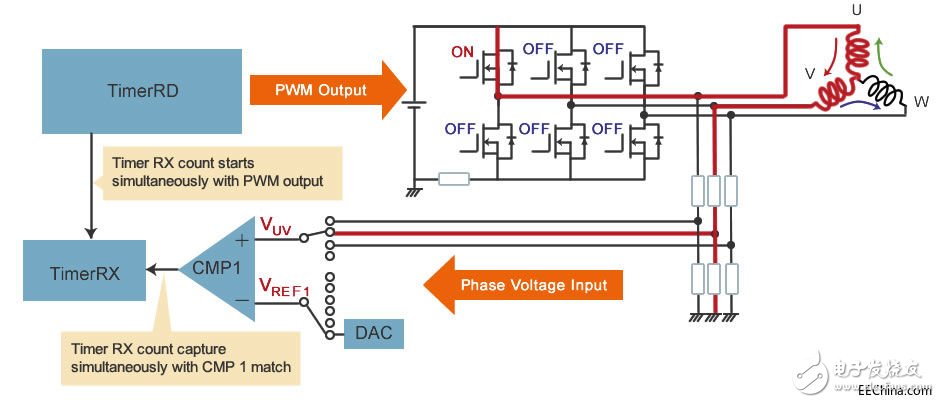
图6、施加U → V电压并量测达到比较参考电压的时间
分别针对全部三个通道U → V、V → W及W → U执行本程序,并按照以下标准决定转子沿三个轴的位置:
若tUV 》 tVW 及 tWU,则转子的磁极方向为沿W轴方向(参见图7)。
CMP1最多可使用四个切换外部输入,进行匹配比较。由于上述操作使用其中三个输入,故可利用时间量测值达到可重复的结果。
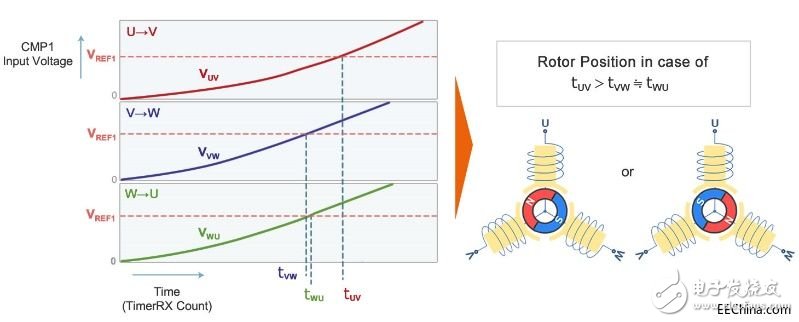
图7、依据U → V、V → W及W → U的量测时间检测转子位置
由于永久磁铁磁场的效应,相应相位端子之间的电感会随转子位置而改变,而此效应的大小亦会以相同的趋势改变Timer RX的计数值。举例来说,假设端子间电感、转子位置及Timer RX计数值的变化如图8所示,则可利用产生的图形决定转子位置。以图7为例,在图8中,电气角度60度及240度时会建立 tUV 》 tVW ≒ tWU 关系。由于此变化在整个360度范围内重复两次,故在任意点上无法判断两个角度(相差180度)中的哪一个是正确的。
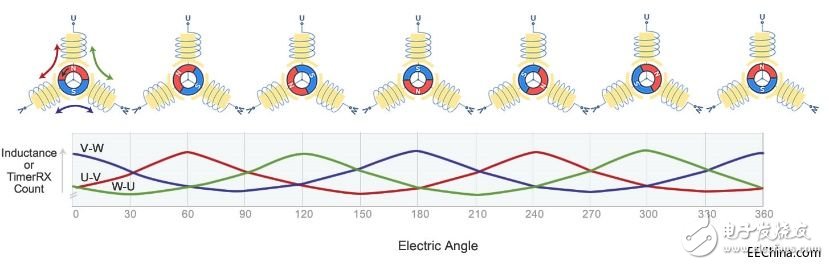
图8、端子间的电感变化取决于转子位置与Timer RX计数值
端子之间的电感及随转子位置之变化会因电机而有所差异。此外,输出至CMP1的相电压行为不仅受到电机电感的影响,亦会受到逆变器威廉希尔官方网站 的影响。因此,用户需要先依据转子位置评估Timer RX计数值的变化并设定CMP1的比较参考电压。
处理步骤2:比较并联电压行为以进行比评估
本节说明用于极性检测的第二个处理步骤。使用的G1F周边功能配置如图9所示。由于此程序以电机电流作为微控制器的输入电压,故需要分流电阻。此输入可用于旋转时的过电流检测。
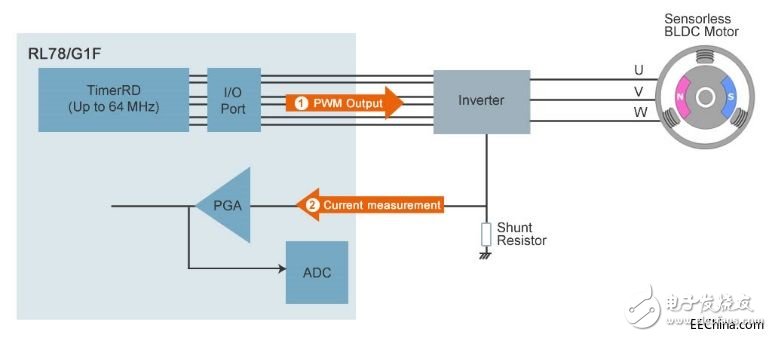
图9、处理步骤2(极性检测)威廉希尔官方网站 配置
依据处理步骤1的结果,可识别磁铁指向方向的相位。此步骤中,在绕组+ve(一相)及–ve(两相)之间施加特定电流,持续固定的时间 (tCONST)。 利用可编程增益放大器 (PGA) 放大该点(电流检测输入)的并联电压,并以A/D转换器 (ADC) 量测。图10上方威廉希尔官方网站 (红色讯号路径)显示当电流从W流向U及V时的讯号。
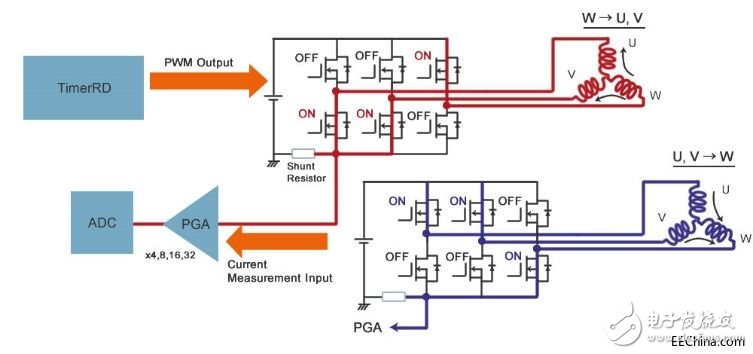
图10、W → U、V电流及U、V → W电流时的并联电压量测
接着,让电流以反向流动相同的时间 (tCONST),并进行同样的并联电压量测。图10下方威廉希尔官方网站 (蓝色讯号路径)显示当电流从U及V流向W时的讯号。
可利用这两个量测值间的大小关系决定永久磁铁的磁通量方向。在图11的例子中,当电流从W流向U及V时的电流值 (IW+) 大于电流反向流动时的电流值 (IW-)。因此,可判定转子方向为W相磁通量增强的方向(电流从W到U的磁通量方向,V与永久磁铁的磁通量方向相同)
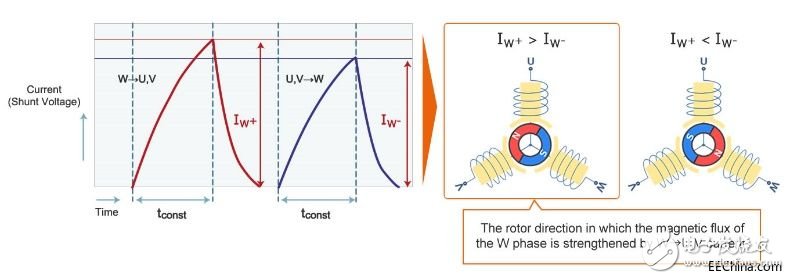
图11、转子极性评估电流(并联电压)
依据处理步骤1和2的结果,可决定转子初始位置。
更多信息请访问瑞萨电子网站
瑞萨电子网站提供本文所述初始转子位置检测方法的详细信息,包括应用说明、程序代码范例、示范影片等。影片提供亲眼证实电机启动动作如何因有/没有初始位置检测而改变。如需更多信息,请利用以下URL连结。
• 初始位置检测示范影片:
推荐课程:
张飞软硬开源,基于STM32 BLDC直流无刷电机驱动器视频套件
http://t.elecfans.com/topic/42.html?elecfans_trackid=fsy_post
-
如何将无传感器BLDC电机控制引入低成本应用2020-08-28 0
-
将无传感器BLDC电机控制引入低成本应用2018-11-08 0
-
L78/G1F 无传感器BLDC电机 初始转子位置检测2019-05-21 0
-
关于BLDC电机控制的所有信息:无传感器无刷直流电机控制器2019-10-25 0
-
无传感器BLDC电机控制怎么引入低成本应用?2020-04-15 0
-
BLDC永磁同步电机无传感器该如何去启动呢2021-09-18 0
-
一种大电流无传感器BLDC电机控制器威廉希尔官方网站2023-09-14 0
-
无传感器的BLDC电机控制2009-09-19 709
-
用dsPIC30F2010控制无传感器BLDC电机,AN992010-03-04 857
-
用dsPIC30F2010控制无传感器的BLDC电机 AN92010-03-18 823
-
无传感器BLDC应用中自主外设互操作的必要性2017-07-20 1265
-
如何使用dsPIC30F2010数字信号控制器控制无传感器的BLDC电机2018-06-28 1209
-
用于驱动无传感器 BLDC 电机的优化控制方案2021-06-17 4689
-
单片机C868实现无传感器BLDC电机控制2021-09-18 819
-
BLDC电机的无传感器梯形控制2024-10-12 210
全部0条评论

快来发表一下你的评论吧 !
