第 1 章 Cortex-M4 按键扫描
1.1 实验目的
熟悉STM32CubeIDE工具软件的使用。
掌握STM32CubeIDE软件的基本设计流程和设计步骤,能够使用工具进行设计、编程、仿真调试。
学习GPIO口的使用方法,掌握如何利用STM32MP157A芯片的I/O口读取按键状态。
1.2 实验环境
FS_MP1A开发平台
ST-Link仿真器
STM32CubeIDE开发软件
PC机 XP、Window7/10 (32/64bit)
1.3 实验原理
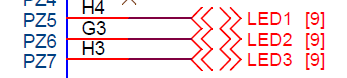
本实验主要通过调用函数HAL_GPIO_ReadPin读取开发板上按键K2的IO口状态,控制LED灯的点亮和关闭状态。
该实验需要使用到开发板上的LED灯,按键,相关硬件威廉希尔官方网站
如下:


1.4 实验步骤
打开STM32CubeIDE-》File-》New-》STM32 Project

可以在左侧搜索框内输入芯片型号STM32MP157A进行搜索,选择对应芯片,点击Next

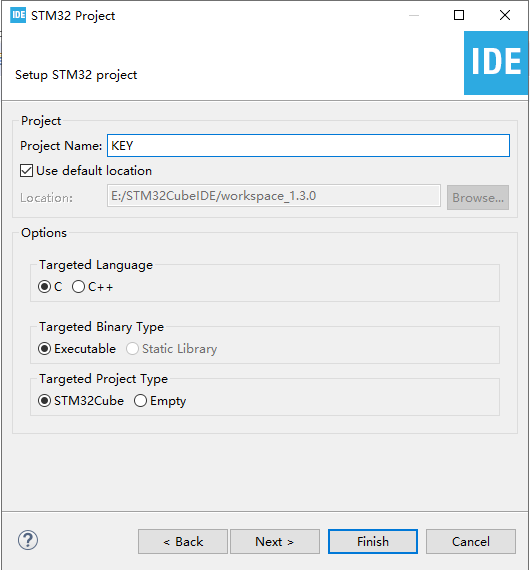
填写工程名,点击Finsh
点击Yes打开配置页面
搜索框内搜索K2对应GPIO引脚PA0,左键点击设置为GPIO_Input

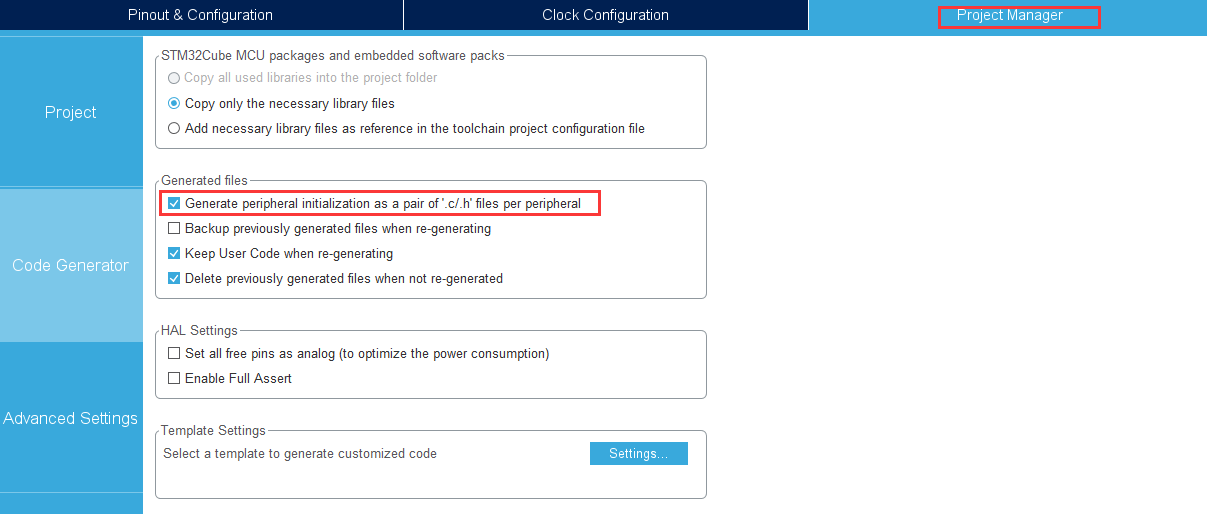
在Code Generator处选择为每个外设生成单独的C和H文件,这样设置方便阅读代码
完成以上设置后,Ctrl+S保存,会提示是否需要生成代码,选择Yes即可自动生成代码。系统会自动生成System Clock代码

可以在左侧工程文件夹找到KEY_CM4子工程,打开main.c
添加GPIO初始化函数,初始化LED灯引脚PZ5为输出模式,初始化K2引脚PA0为输入模式
void bsp_gpio_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOZ_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
HAL_GPIO_WritePin(GPIOZ, GPIO_PIN_5, GPIO_PIN_SET);
/*Configure GPIO pin : PZ5 */
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOZ, &GPIO_InitStruct);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
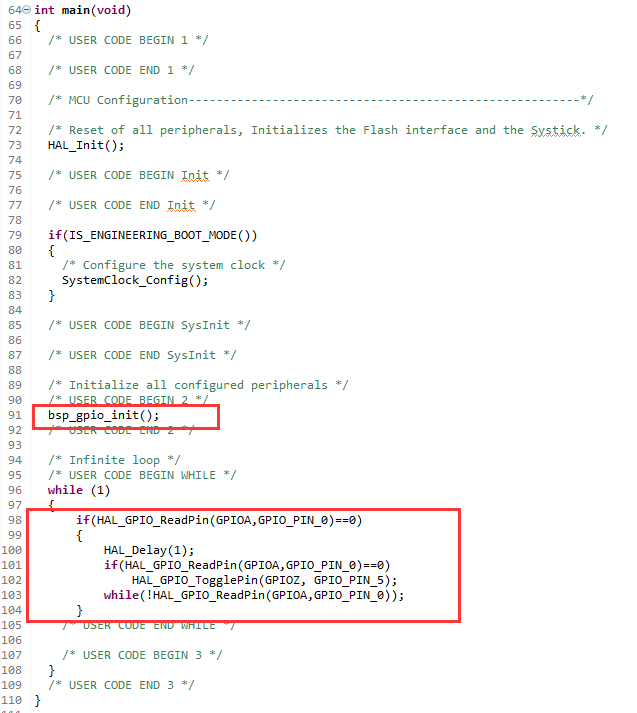
在main.c中调用GPIO初始化函数,在while循环中添加GPIO读函数,判断K2引脚高低电平,改变LED灯状态
1.5 实验现象
按下K2键,可看到LED灯状态发生改变。
第 1 章 Cortex-M4 按键扫描
1.1 实验目的
熟悉STM32CubeIDE工具软件的使用。
掌握STM32CubeIDE软件的基本设计流程和设计步骤,能够使用工具进行设计、编程、仿真调试。
学习GPIO口的使用方法,掌握如何利用STM32MP157A芯片的I/O口读取按键状态。
1.2 实验环境
FS_MP1A开发平台
ST-Link仿真器
STM32CubeIDE开发软件
PC机 XP、Window7/10 (32/64bit)
1.3 实验原理
本实验主要通过调用函数HAL_GPIO_ReadPin读取开发板上按键K2的IO口状态,控制LED灯的点亮和关闭状态。
该实验需要使用到开发板上的LED灯,按键,相关硬件威廉希尔官方网站
如下:
1.4 实验步骤
打开STM32CubeIDE-》File-》New-》STM32 Project
可以在左侧搜索框内输入芯片型号STM32MP157A进行搜索,选择对应芯片,点击Next
填写工程名,点击Finsh
点击Yes打开配置页面
搜索框内搜索K2对应GPIO引脚PA0,左键点击设置为GPIO_Input
在Code Generator处选择为每个外设生成单独的C和H文件,这样设置方便阅读代码
完成以上设置后,Ctrl+S保存,会提示是否需要生成代码,选择Yes即可自动生成代码。系统会自动生成System Clock代码
可以在左侧工程文件夹找到KEY_CM4子工程,打开main.c
添加GPIO初始化函数,初始化LED灯引脚PZ5为输出模式,初始化K2引脚PA0为输入模式
void bsp_gpio_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOZ_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
HAL_GPIO_WritePin(GPIOZ, GPIO_PIN_5, GPIO_PIN_SET);
/*Configure GPIO pin : PZ5 */
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOZ, &GPIO_InitStruct);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
在main.c中调用GPIO初始化函数,在while循环中添加GPIO读函数,判断K2引脚高低电平,改变LED灯状态
1.5 实验现象
按下K2键,可看到LED灯状态发生改变。

 举报
举报












 举报
举报



