一、简介
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。伺服电机通常被称为舵机,它是一种带有输出轴的小装置。向伺服器发送一个控制信号时,输出轴就可以转到特定的位置。只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。如果控制信号发生变化,输出轴的位置也会相应发生变化。日常生活中,舵机常被用于遥控飞机、遥控汽车、机器人等领域。
二、工作原理及控制
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准威廉希尔官方网站
,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的:
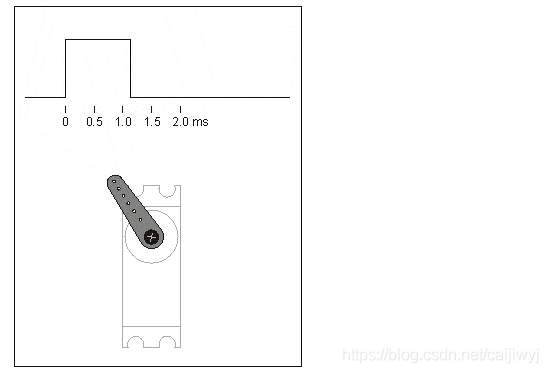 0.5ms -------------- 0度;
1.0ms -------------- 45度;
1.5ms -------------- 90度;
2.0ms -------------- 135度;
2.5ms ------------ 180度;
当然这只是一种参考数值,具体的参数还得看你的舵机是多少度的舵机,1.5ms就相当于度数中值
三、stm32f103re 控制舵机
舵机如下:
0.5ms -------------- 0度;
1.0ms -------------- 45度;
1.5ms -------------- 90度;
2.0ms -------------- 135度;
2.5ms ------------ 180度;
当然这只是一种参考数值,具体的参数还得看你的舵机是多少度的舵机,1.5ms就相当于度数中值
三、stm32f103re 控制舵机
舵机如下:
 上图中的三根线:
橙色 ---- 信号线
红色 ---- 电源VCC
棕色 ---- 地线GND
Stm32引脚:
上图中的三根线:
橙色 ---- 信号线
红色 ---- 电源VCC
棕色 ---- 地线GND
Stm32引脚:
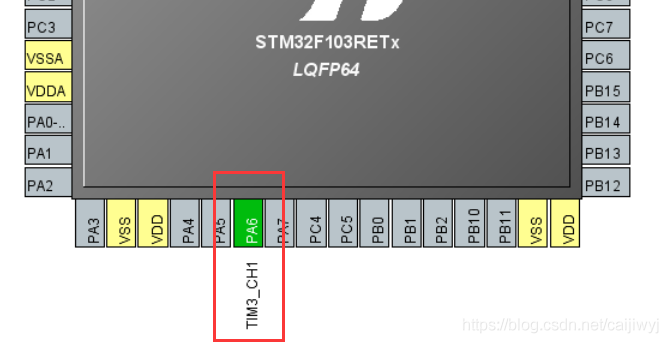 配置stm32f103re的TIM3通道1为PWM通道,对应为PA6引脚
配置stm32f103re的TIM3通道1为PWM通道,对应为PA6引脚
初始化GPIO引脚以及TIM3 PWM 通道1:
对应TIM3 PWM 通道1的引脚为PA6,这里配置PWM模式2,CNT>CRR的时候的值为有效电平,所以调舵机角度的函数下面是减掉的值为有效电平
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
//设置该引脚为复用输出功能,输出TIM3 CH1的PWM脉冲波形 GPIOA.6
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel 1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
调舵机角度:
1~180度对应0.5ms~2.5ms,就可以算出对应关系,因为上面配置的是PWM模式2,CCR值为20000-500的时候对应的是0.5ms舵机为0度,CCR值为20000-2500的时候对应2.5ms舵机为180度。
void set_angle_steer(float angle)
{
float slope = 11.111 ;
u16 i = 0 ;
if( angle < 0 )
{
angle = 0 ;
}
if(angle > 180)
{
angle = 180 ;
}
i = (u16)(slope*angle+500) ;
TIM_SetCompare1(TIM3,20000-i) ;
}
主函数:
int main(void)
{
...
/* 初始化定时器3的通道1作为PWM通道 */
TIM3_PWM_Init(20000, 72-1) ;//enable TIM3 for Sterring
...
while(1)
{
...
/* 一次转30度,转到180度或者0度就反转 */
if(data == 0)
{
i += 30 ;
set_angle_steer(i) ;
if(i >= 180)
{
data = 1 ;
}
delay_ms(1000) ;
}
if(data == 1)
{
i -= 30 ;
set_angle_steer(i) ;
if(i <= 0)
{
data = 0 ;
}
delay_ms(1000) ;
}
}//end of while(1)
}
运行效果:

一、简介
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。伺服电机通常被称为舵机,它是一种带有输出轴的小装置。向伺服器发送一个控制信号时,输出轴就可以转到特定的位置。只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。如果控制信号发生变化,输出轴的位置也会相应发生变化。日常生活中,舵机常被用于遥控飞机、遥控汽车、机器人等领域。
二、工作原理及控制
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准威廉希尔官方网站
,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms -------------- 0度;
1.0ms -------------- 45度;
1.5ms -------------- 90度;
2.0ms -------------- 135度;
2.5ms ------------ 180度;
当然这只是一种参考数值,具体的参数还得看你的舵机是多少度的舵机,1.5ms就相当于度数中值
三、stm32f103re 控制舵机
舵机如下:
上图中的三根线:
橙色 ---- 信号线
红色 ---- 电源VCC
棕色 ---- 地线GND
Stm32引脚:
配置stm32f103re的TIM3通道1为PWM通道,对应为PA6引脚
初始化GPIO引脚以及TIM3 PWM 通道1:
对应TIM3 PWM 通道1的引脚为PA6,这里配置PWM模式2,CNT>CRR的时候的值为有效电平,所以调舵机角度的函数下面是减掉的值为有效电平
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
//设置该引脚为复用输出功能,输出TIM3 CH1的PWM脉冲波形 GPIOA.6
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel 1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
调舵机角度:
1~180度对应0.5ms~2.5ms,就可以算出对应关系,因为上面配置的是PWM模式2,CCR值为20000-500的时候对应的是0.5ms舵机为0度,CCR值为20000-2500的时候对应2.5ms舵机为180度。
void set_angle_steer(float angle)
{
float slope = 11.111 ;
u16 i = 0 ;
if( angle < 0 )
{
angle = 0 ;
}
if(angle > 180)
{
angle = 180 ;
}
i = (u16)(slope*angle+500) ;
TIM_SetCompare1(TIM3,20000-i) ;
}
主函数:
int main(void)
{
...
/* 初始化定时器3的通道1作为PWM通道 */
TIM3_PWM_Init(20000, 72-1) ;//enable TIM3 for Sterring
...
while(1)
{
...
/* 一次转30度,转到180度或者0度就反转 */
if(data == 0)
{
i += 30 ;
set_angle_steer(i) ;
if(i >= 180)
{
data = 1 ;
}
delay_ms(1000) ;
}
if(data == 1)
{
i -= 30 ;
set_angle_steer(i) ;
if(i <= 0)
{
data = 0 ;
}
delay_ms(1000) ;
}
}//end of while(1)
}
运行效果:

 举报
举报






 举报
举报



