搜索内容
登录
并联机器人
4人关注
并联机器人,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
...展开
46
文章
0
视频
1
帖子
15273
阅读
关注标签,获取最新内容
全部
技术
资讯
资料
帖子
并联机器人市场现状浅析:市场小,玩家少
2018-10-25
4773阅读
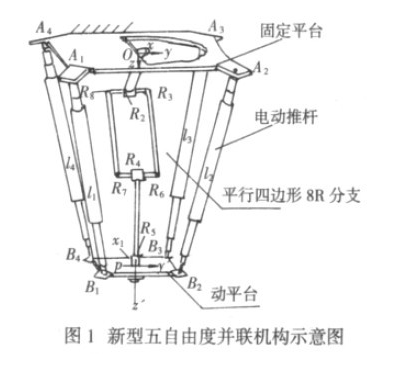
运用BLDC对新型五自由度并联机器人的设计
2018-10-07
6136阅读
机器替换人的浪潮已来,阿童木打造并联机器人蓝海
2018-08-22
2443阅读
并联机器人在某些领域却将迎来增长的爆发点,这一切的根源又是什么?
2018-08-17
4262阅读
《我不是药神》希望救命药不要来的太迟
2018-07-14
322阅读
华盛控科技中国梦想的践行者
2018-07-14
444阅读
新松机器人将参加2018上海国际加工包装展
2018-07-03
3783阅读
基于并联机器人非线性方程求解
2017-12-01
1015阅读
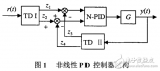
基于非线性PID控制算法的并联机器人
2017-11-08
998阅读
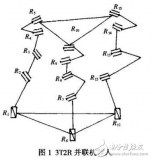
并联机器人的少自由度并联机构设计
2017-10-23
1144阅读
并联机器人机构特点及其设计与分析
2017-10-21
1442阅读
并联机器人的特点及其运动模拟器等相关设计的介绍
2017-10-17
1463阅读
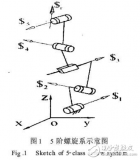
反螺旋理论与五自由度并联机器人设计方法
2017-10-17
923阅读
基于OpenMP的Stewart并联机器人控制系统_李昂
2017-03-19
829阅读
并联机器人机构学理论及控制
2012-07-21
1302阅读
并联机器人的冗余驱动控制
2011-07-06
1088阅读
一种平面微雕并联机器人系统的设计
2010-03-03
743阅读
并联机器人的带分离干扰补偿器的离散变结构控制研究
2010-03-03
700阅读
上一页
3
/
3
下一页
相关推荐
更多 >
IOT
海思
STM32F103C8T6
数字隔离
硬件工程师
wifi模块
74ls74
MPU6050
Protues
UHD
STC12C5A60S2
×
20
完善资料,
赚取积分





 下载APP
下载APP
 搜索内容
搜索内容
