
广汽集团无图纯视觉智能驾驶技术解读

康谋技术 |深入探讨:自动驾驶中的相机标定技术

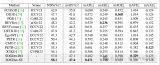
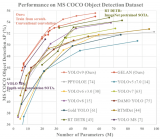
基于AX650N/AX620Q部署YOLO-World

汽车智能化发展重要环节之智能驾驶域控制器
小米自动驾驶技术:算法篇

线控转向技术:自动驾驶中路径与方向的精准驾驭
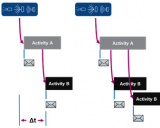
什么是嵌入式实时系统的确定性?简析EDMS中的确定性
在控道AI盒子上基于YOLOv9实现实时目标检测实战

理想汽车自动驾驶端到端模型实现

一文解析智能驾驶的功能体系

自动驾驶的激光雷达历史、发展梳理
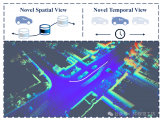
LiDAR4D:基于时空新颖的LiDAR视角合成框架

汽车电子系统MCU和SoC的差异
PREEvision中的逻辑架构:实现车辆系统设计的高效抽象化

硅基片上激光雷达的测距原理

工程实践中VINS与ORB-SLAM的优劣分析

荣威RX5智能驾驶域控制器方案

基于毫米波雷达和多视角相机鸟瞰图融合的3D感知方法

基于掩码模型的LiDAR感知模型预训练策略
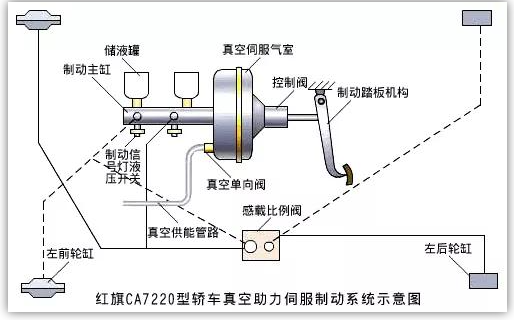
线控制动系统构成及工作原理

 下载APP
下载APP
 搜索内容
搜索内容
