 详解单片机三种应用程序的架构
详解单片机三种应用程序的架构
摘要:对于单片机程序来说,大家都不陌生,但是真正使用架构,考虑架构的恐怕并不多,随着程序开发的不断增多,架构是非常必要的。
应用程序的架构大致有三种:
1、简单的前后台顺序执行程序,这类写法是大多数人使用的方法,不需用思考程序的具体架构,直接通过执行顺序编写应用程序即可。
2、时间片轮询法,此方法是介于顺序执行与操作系统之间的一种方法。
3、操作系统,此法应该是应用程序编写的最高境界。
一、程序框架设计
1、前后台顺序执行法
这是初学者们常用的程序框架设计方案,不用考虑太多东西,代码简单,或者对系统的整体实时性和并发性要求不高;初始化后通过while(1){}或for(;;){}`循环不断调用自己编写完成的函数,也基本不考虑每个函数执行所需要的时间,大部分情况下函数中或多或少都存在毫秒级别的延时等待。
-
优点:对于初学者来说,这是最容易也是最直观的程序架构,逻辑简单明了,适用于逻辑简单,复杂度比较低的软件开发。
-
缺点:实时性低,由于每个函数或多或少存在毫秒级别的延时,即使是1ms,也会造成其他函数间隔执行时间的不同,虽然可通过定时器中断的方式,但是前提是中断执行函数花的时间必须短。当程序逻辑复杂度提升时,会导致后来维护人员的大脑混乱,很难理清楚该程序的运行状态。
以下是在校期间做的寝室防盗系统的部分代码(当时也存在部分BUG,没有解决。现在再看,其实很多问题,而且比较严重,比如中断服务函数内竟然有3000ms延时,这太可怕了,还有串口发送等等;由于实时性要求不算太高,因此主函数中的毫秒级别延时对系统运行没有多大影响,当然除BUG外;若是后期需要维护,那就是一个大工程,还不如推翻重写):
intmain(void)
{
u8temperature;
u8humidity;
inta;
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
I2c_init();
uart2_Init(9600);
uart_init(9600);//串口初始化为115200
TIM3_Int_Init(4999,7199);
ds1302_init();
while(DHT11_Init())//DHT11初始化
{
led2=0;
}
a1602_init();
Ds1302Init();
EXTIX_Init();
GPIOX_Init();
lcd12864_INIT();
LcdInit();
beep_init();
RED_Init();
led1=1;
beep=0;
while(1)
{
for(a=0;a<11;a++)
{
num[a+3]=At24c02Read(a+2)-208;
delay_us(10);
}
for(a=0;a<6;a++)
{
shuru[a]=At24c02Read(a+13)-208;
delay_us(10);
}
delay_ms(10);
RED_Scan();
Ds1302ReadTime();//读取ds1302的日期时间
shi=At24c02Read(0);//读取闹钟保存的数据
delay_ms(10);
fen=At24c02Read(1);//读取闹钟保存的数据
usart2_scan();//蓝牙数据扫描
usart2_bian();//蓝牙处理数据
usart2_gai();
nao_scan();
k++;
if(k<20)
{
if(k==1)
LcdWriteCom(0x01);//清屏
LcdDisplay();//显示日期时间
}
if(RED==0)
RED_Scan();
if(k>=20&&k<30)
{
if(k==20)
LcdWriteCom(0x01);//清屏
Lcddisplay();//显示温湿度
LcdWriteCom(0x80+6);
DHT11_Read_Data(&temperature,&humidity);//读取温湿度值
Temp=temperature;Humi=humidity;
LcdWriteData('0'+temperature/10);
LcdWriteData('0'+temperature%10);
LcdWriteCom(0x80+0X40+6);
LcdWriteData('0'+humidity/10);
LcdWriteData('0'+humidity%10);
}
if(k==30)
k=0;
lcd12864();//显示防盗闹钟状态
}
}
//定时器3中断服务程序
voidTIM3_IRQHandler(void)//TIM3中断
{
inti;
if(TIM_GetITStatus(TIM3,TIM_IT_Update)!=RESET)//检查TIM3更新中断发生与否
{
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);//清除TIMx更新中断标志
if(key1==1&&FEN-fen==0&&SHI-shi==0)//时间一到闹钟响起
{
f=1;
}
if(key1==0||FEN-fen!=0||SHI-shi!=0)
else
{
f=0;
}
if(USART_RX_BUF[0]=='R'&&USART_RX_BUF[1]=='I'&&USART_RX_BUF[2]=='N'&&USART_RX_BUF[3]=='G')
{
key0=1;
for(i=0;i<17;i++)
{
USART_SendData(USART1,num[i]);//向串口1发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
USART_RX_STA=0;
}
delay_ms(3000);
for(i=0;i<3;i++)
{
USART_SendData(USART1,num1[i]);//向串口1发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
USART_RX_STA=0;
}
}
}
}
二、时间片论法
介于前后台顺序执行法和操作系统之间的一种程序架构设计方案。该设计方案需能帮助嵌入式软件开发者更上一层楼,在嵌入式软件开发过程中,若遇到以下几点,那么该设计方案可以说是最优选择,适用于程序较复杂的嵌入式系统;
- 目前的需求设计需要完全没有必要上操作系统。
- 任务函数无需时刻执行,存在间隔时间(比如按键,一般情况下,都需要软件防抖,初学者的做法通常是延时10ms左右再去判断,但10ms极大浪费了CPU的资源,在这段时间内CPU完全可以处理很多其他事情)
- 实时性有一定的要求。
该设计方案需要使用一个定时器,一般情况下定时1ms即可(定时时间可随意定,但中断过于频繁效率就低,中断太长,实时性差),因此需要考虑到每个任务函数的执行时间,建议不能超过1ms(能通过程序优化缩短执行时间则最好优化,如果不能优化的,则必须保证该任务的执行周期必须远大于任务所执行的耗时时间),同时要求主循环或任务函数中不能存在毫秒级别的延时。
“如何确定每个函数的任务周期呢?根据任务的耗时和效果决定、如按键扫描任务周期为 10ms(为了提高响应),指示灯控制任务周期为 100ms(通常情况下最高100ms的闪烁频率正好,特殊需求除外),LCD/OLED 显示周期为 100ms(通过这种通过SPI/IIC等接口的方式耗时大约在 1~10ms,甚至更长,所以任务周期必须远大于耗时,同时为了满足人眼所能接受的刷屏效果,也不能太长,100ms 的任务周期比较合适)等。
”
以下介绍两种不同的实现方案,分别针对无函数指针概念的朋友和想进一步学习的朋友。
1、无函数指针的设计方式
/**
*@brief主函数.
*@paramNone.
*@returnNone.
*/
intmain(void)
{
System_Init();
while(1)
{
if(TIM_1msFlag)//1ms
{
CAN_CommTask();//CAN发送/接收通信任务
TIM_1msFlag=0;
}
if(TIM_10msFlag)//10ms
{
KEY_ScanTask();//按键扫描处理任务
TIM_10msFlag=0;
}
if(TIM_20msFlag)//20ms
{
LOGIC_HandleTask();//逻辑处理任务
TIM_20msFlag=0;
}
if(TIM_100msFlag)//100ms
{
LED_CtrlTask();//指示灯控制任务
TIM_100msFlag=0;
}
if(TIM_500msFlag)//500ms
{
TIM_500msFlag=0;
}
if(TIM_1secFlag)//1s
{
WDog_Task();//喂狗任务
TIM_1secFlag=0;
}
}
}
/**
*@brief定时器3中断服务函数.
*@paramNone.
*@returnNone.
*/
voidTIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET)//溢出中断
{
sg_1msTic++;
sg_1msTic%1==0?TIM_1msFlag=1:0;
sg_1msTic%10==0?TIM_10msFlag=1:0;
sg_1msTic%20==0?TIM_20msFlag=1:0;
sg_1msTic%100==0?TIM_100msFlag=1:0;
sg_1msTic%500==0?TIM_500msFlag=1:0;
sg_1msTic%1000==0?(TIM_1secFlag=1,sg_1msTic=0):0;
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);//清除中断标志位
}
2、含函数指针的设计方式
/**
*@brief任务函数相关信息结构体定义.
*/
typedefstruct{
uint8m_runFlag;/*!< 程序运行标记:0-不运行,1运行 */
uint16m_timer;/*!< 计时器 */
uint16m_itvTime;/*!< 任务运行间隔时间 */
void(*m_pTaskHook)(void);/*!< 要运行的任务函数 */
}TASK_InfoType;
#defineTASKS_MAX5//定义任务数目
/**任务函数相关信息*/
staticTASK_InfoTypesg_tTaskInfo[TASKS_MAX]={
{0,1,1,CAN_CommTask},//CAN通信任务
{0,10,10,KEY_ScanTask},//按键扫描任务
{0,20,20,LOGIC_HandleTask},//逻辑处理任务
{0,100,100,LED_CtrlTask},//指示灯控制任务
{0,1000,1000,WDog_Task},//喂狗任务
};
/**
*@brief任务函数运行标志处理.
*@note该函数由1ms定时器中断调用
*@paramNone.
*@returnNone.
*/
voidTASK_Remarks(void)
{
uint8i;
for(i=0;i< TASKS_MAX; i++)
{
if(sg_tTaskInfo[i].m_timer)
{
sg_tTaskInfo[i].m_timer--;
if(0==sg_tTaskInfo[i].m_timer)
{
sg_tTaskInfo[i].m_timer=sg_tTaskInfo[i].m_itvTime;
sg_tTaskInfo[i].m_runFlag=1;
}
}
}
}
/**
*@brief任务函数运行处理.
*@note该函数由主循环调用
*@paramNone.
*@returnNone.
*/
voidTASK_Process(void)
{
uint8i;
for(i=0;i< TASKS_MAX; i++)
{
if(sg_tTaskInfo[i].m_runFlag)
{
sg_tTaskInfo[i].m_pTaskHook();//运行任务
sg_tTaskInfo[i].m_runFlag=0;//标志清0
}
}
}
/**
*@brief主函数.
*@paramNone.
*@returnNone.
*/
intmain(void)
{
System_Init();
while(1)
{
TASK_Process();
}
}
/**
*@brief定时器3中断服务函数.
*@paramNone.
*@returnNone.
*/
voidTIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET)//溢出中断
{
TASK_Remarks();
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);//清除中断标志位
}
三、操作系统
嵌入式操作系统EOS(Embedded OperatingSystem)是一种用途广泛的系统软件,过去它主要应用于工业控制和国防系统领域,而对于单片机来说,比较常用的有UCOS、FreeRTOS、RT-Thread Nano和RTX 等多种抢占式操作系统(其他如Linux等操作系统不适用于单片机)
操作系统和“时间片论法”,在任务执行方面来说,操作系统对每个任务的耗时没有过多的要求,需要通过设置每个任务的优先级,在高优先级的任务就绪时,会抢占低优先级的任务;操作系统相对复杂,因此这里没有详细介绍了。
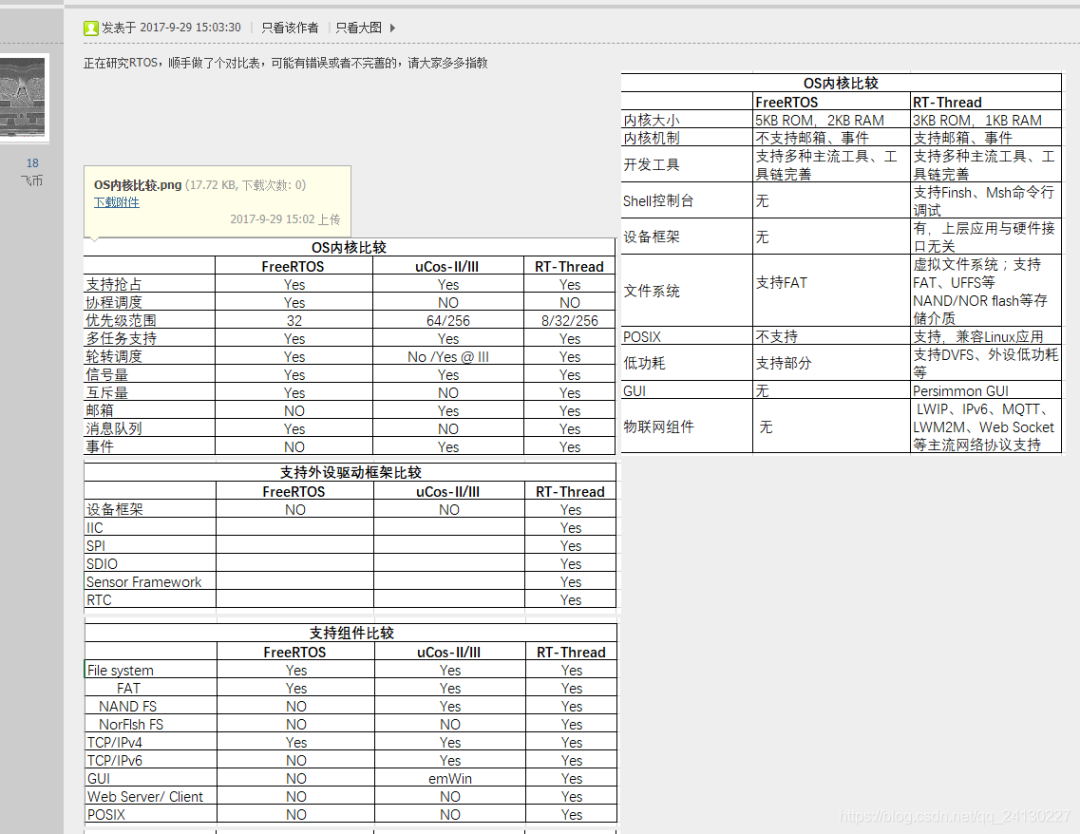
关于如何选择合适的操作系统(uCOS、FreeRTOS、RTThread、RTX等RTOS的对比之特点:
- uCOS:网上资料丰富,非常适合学习,但是在产品上使用则需要收费。
- FreeRTOS:使用免费,因此很多产品都在用。
- RT-Thread:国产物联网操作系统,有着十分丰富的组件,也免费,资料:RT-Thread文档中心。
- RTX:为ARM和Cortex-M设备设计的免版税,确定性的实时操作系统。
借网上一张对比图:
四、总结
从上述的对比中可以看出,时间片轮询法的优势还是比较大的,它既有前后台顺序执行法的优点,也有操作系统的优点。结构清晰,简单,非常容易理解,所以这种是比较常用的单片机设计框架。
原文标题:嵌入式软件开发常用的3种架构
文章出处:【微信公众号:嵌入式ARM】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
单片机
+关注
关注
6036文章
44555浏览量
634955 -
嵌入式
+关注
关注
5082文章
19117浏览量
304962 -
应用程序
+关注
关注
37文章
3268浏览量
57694 -
架构
+关注
关注
1文章
513浏览量
25468
原文标题:嵌入式软件开发常用的3种架构
文章出处:【微信号:gh_c472c2199c88,微信公众号:嵌入式微处理器】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
单片机大致应用程序的架构有三种
单片机MCU应用程序架构的相关资料分享
怎样架构你的单片机程序
单片机大致应用程序的架构总结
单片机的应用程序架构有哪些?三种架构的详细资料和代码说明
干货:一文搞懂单片机应用程序架构
单片机大致应用程序的三种架构总结、方法的利弊和适应范围
三种单片机应用程序的架构的利弊和适应范围资料下载

嵌入式软件开发三种程序架构详解

单片机MCU应用程序架构
一文搞懂单片机应用程序架构





 工商网监
工商网监
评论