线性2自由度汽车模型是汽车操纵稳定性分析中最简单、最典型的模型。
2023-06-28 16:52:31 541
541 
本期采用Simulink建立汽车2自由度动力学模型。为了便于掌握汽车稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2023-06-28 16:39:13443 
本文示例将实现4自由度并联机器狗行走的功能。
2023-06-18 10:49:20316 
本文实例将实现2自由度并联仿生腿模组运动起来,模拟实现狗腿行走的动作。
2023-06-18 10:35:20136 
人的手臂(腕关节到肩关节)有几个自由度?我想绝大部分人都没有想过,更别说去了解有哪几个自由度,即使是学工科的人,也未必能解释清楚。没想到知乎上居然有人把这个问题回答的这么专业有内涵,同时又那么有哲理,忍不住想要把这个答案分享一下。
2023-06-07 15:48:16529 
随着机器人变得日益成熟,它们已经能够应用到处理越来越多的工业工序。6自由度(6Dof)机器人能够执行复杂的动作,因而可以在许多复杂的工业任务当中展示良好的性能,比如码垛、搬运、涂胶和焊接等。6自由度机器人可以提举和灵活地操纵重型载荷,并通过复杂的几何运动对载荷进行精确操控。
2023-05-18 17:34:21404 
基于三维模型的视觉定位通过在查询图像和三维模型间建立 2D-3D 对应关系,估计相机六自由度的位姿。传统的视觉定位方法通常采用人工设计的局部特征,如 SIFT,来实现 2D-3D 匹配,并结合图像检索技术,将匹配范围限制在查询图像的可见区域,以适应大规模场景的需求。
2023-04-20 10:07:05572 工业机器人自由度一般分为4个自由度,或者6个自由度,关节机器人主要是模仿人的手臂进行设计的。
2023-03-16 12:20:30892 1、功能描述 R308样机是一款拥有3自由度的串联机械臂。本文提供的示例所实现的功能为:在3自由度串联机械臂样机上安装电磁铁,实现电磁铁搬运物品的功能。 2、电子硬件 在这个示例中,我们
2023-03-09 08:31:06376 
1. 运动功能说明 R204样机是一款拥有4个自由度的串联机械臂。本文示例实现4自由度串联机械臂抓取物品、放下的功能。 2. 结构说明 R204号样机由4个串联的 舵机关节模组 和1个
2023-03-03 17:35:42351 
一个微型的三自由度机械臂,您甚至可以记录运动并循环它!
2022-12-07 14:00:37 0
0 无线电编、译码发射和接收遥控器1.7智能小车的直流电机控制1.8计算机与智能小车的串口通信1.9智能小车的自动寻迹实验1.10三自由度的机械爬虫的运动原理1.11附录ICCAVR简介1.12附录串口调试软件
2011-03-09 12:37:40
ADIS16488:战术级十自由度惯性传感器数据表
2021-05-27 18:24:5611 ADIS16385:六自由度惯性传感器报废数据表
2021-05-24 09:14:261 ADIS16485:战术级六自由度惯性传感器数据表
2021-05-23 17:32:479 ADIS16367:六自由度惯性传感器报废数据表
2021-05-10 15:50:024 在自主研制的新型五自由度并联机器人的基础上, 设计完成了以微机、无刷直流电机、PCI 接口测控卡为基础的控制系
2021-05-05 23:21:002420 
码垛机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行。
2020-09-02 14:27:15923 由两个发送端组成整个机械臂系统,发送端一图5.7在PCB线路板上设计并焊接集成了STM32F103C8核心板,MPU6050姿态传感器,nRF24L01无线收发器和一个控制机械臂爪子部分夹取功能的按钮。
2020-08-27 17:35:428647 什么是六自由度压电纳米定位台? 六自由度压电纳米定位台可产生X、Y、Z三轴直线运动以及x、y、z 三轴偏转/旋转角度运动的压电平台。六自由度压电定位台应用举例 -光纤对接调整 光纤裸纤一般分为三
2020-08-10 11:37:39845 三自由度飞机飞行姿态模拟实验台是集机械技术、控制技术和传感器检测技术、计算机技术于一体的综合性测试设备。它作为一种空间运动机构是飞机进行动态性能测试的关键设备,主要用于模拟飞机的运动姿态,为飞机提供
2020-04-12 17:17:00715 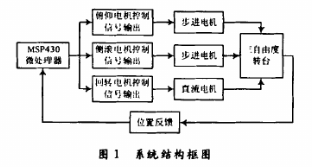
本文对一种新型的二自由度并联机器人进行分析。机器人可以放置在一个固定方向的平面刚体。首先详细介绍了机器人的运动结构,然后分析了一些运动的问题,如正向和逆向的运动学,速度,和奇异点。对工作和装配
2020-03-26 16:27:297 六自由度运动平台是典型的并联运动机构,由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支作动筒的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2020-03-07 16:54:001070 小型廉价的6自由度机械臂,希望能圆大家一个玩机械手的梦! DFLG6DOF机械手由6个微型伺服电机(舵机)组成,分别对应于臂、肘、腕(2个自由度)、张合5个关节和1个旋转底座,每个关节可在一定范围内运动,底座可以实现左右90度旋转。通过上位
2020-01-14 10:48:393941 
个玩机械手的梦! DFLG5DOF机械手由5个微型伺服电机(舵机)组成,分别对应于臂、肘、腕(2个自由度)、张合5个关节,每个关节可在一定范围内运动。通过上位机控制软件给舵机控制器发送控制指令,从而实现机械臂在空间中的精确作业。 在机
2020-01-14 10:43:262354 
,仿真功能强大,可以在模型中通过改变结构,优化系统参数,在仿真环境中分析结果。利用 SimMechanics 的上述优点,以工业六自由度机械臂 ER10 为研究对象,将 SolidWorks 建立好的机械臂 ER10 模型导入到 MATLAB/ SimMechanics 仿真平台中,生成对应的仿真模型,
2019-11-12 08:00:001 我希望这些照片对您有所帮助组装您的4自由度机械臂。
2019-10-09 11:52:039029 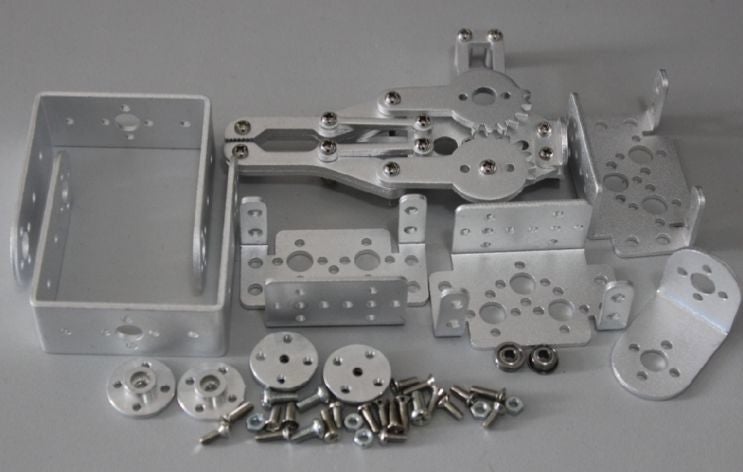
现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
2019-04-10 13:49:5310278 现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
2019-03-17 09:23:0225476 积累和放大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度( 6DOF) 并联机器人, 但在某些场合2~5 个自由度即可满足使用要求, 这类少于6 自由度
2018-10-07 10:57:005266 
记者从中国科大获悉,该校郭光灿院士团队李传锋、周宗权等人成功研制出多自由度并行复用的固态量子存储器,在国际上首次实现跨越3个自由度的复用量子存储,并展示了时间和频率自由度的任意光子脉冲操作功能。该成果近日发表在国际期刊《自然·通讯》上。
2018-08-30 14:08:071832 基于牛顿欧拉法,针对一种采用非对称液压缸构建的新型三自由度并联机构进行了完整的动力学建模,为该机构结构优化打下基础。运用非对称阀控制非对称缸负载匹配理论,给出了一定结构参数和运动性能要求下的负载轨迹、最佳负载匹配曲线以及相关液压参数,为液压元件的选型提供设计依据。
2018-03-26 11:15:211 针对工业中片状材料自动化传输的应用需求和垂直方向占用空间小的要求,设计了一种成本低、工作空间大和占用空间小的自由度多关节机械手臂。该机械臂是一种3关节3连杆式机械结构,采用减速机和二级同步带进行传动
2018-03-20 14:52:515 VR动感椅运动平台原型为三自由度并联运动机构,由六自由度Stewart机构衍生而来。本研究设计的一种新型的具有防扭结构的三自由度并联运动平台,应用于虚拟现实技术中的动感椅结构中。基于VR技术的动感椅
2018-03-13 11:07:090 针对三自由度并联气动柔性执行器的工作空间计算问题,对其T作空间的计算方法和评价标准进行了研究。对该类利用柔性结构和压缩空气实现运动的新型执行器进行了运动学分析。通过对其3个气动柔性元件以及两个圆盘
2018-03-13 10:39:520 对接控制设备仿真试验失重状态模拟三自由度气浮平台是为某空间对接控制设备的全物理仿真模拟验证试验设计的。通过对平台气浮功能及运动功能的设计,确定了气控系统工作原理及元件选型;在结构方面,注重运动的平稳
2018-03-01 10:25:190 的变化曲线,验证了求解算法的正确性;运用Kutzbach-Grubler公式分析了电驱动UPU结构形式并联运动平台白由度的计算方法。根据给定参数建立了平台的三维模型,进行了结构协调性检测,并完成了步进电机驱动的六自由度平台的实体结构研制。
2018-02-27 15:37:294 针对传统机械臂负载白重比小、臂身惯量大、人机交互安全性弱等问题,对绳驱动机械臂的结构、绳驱关节耦合、冗余运动学等方面进行了研究,创新设计了一种新型7自由度冗余绳驱动机械臂。采用绳索间接驱动前端4个
2018-02-27 14:33:477 现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个自由度?才发现,原来7个
2018-02-07 15:40:2517074 
机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度(Degree of Freedom),由DOF简写表示。
2018-01-17 10:03:2010842 为了解决三自由度Delta机器人工作空间的仿真问题,在总结已有的Delta机器人工作空间仿真方法的基础上,基于Matlab和Catia提出了三种具有代表性的Delta机器人工作空间仿真方法,以实验室
2018-01-05 16:13:291 对机器人进行相应的优化设计可以使机器人具有更好的结构性能与工作性能。以一种三自由度冗余驱动混联机器人为研究对象,对该机器人尺寸参数无量纲化并分析该机器人可达的工作空间,进而在混联机器人工作空间中找出
2018-01-05 14:24:191 针对传统内模控制方法不能兼顾系统跟随性、抗干扰性和鲁棒性的问题,提出了一种基于三自由度内模控制的永磁同步电机矢量控制方法。该方法基于永磁同步电机矢量控制系统,分析了系统实现稳定性和鲁棒性的条件,根据
2017-12-29 16:27:473 更合理的最优规划依据,从而实现更安全可靠的规划。同时将一个六自由度的规划问题降维为一个三自由度规划和一个四自由度规划的问题,在此基础上利用无需实时计算的先验碰撞数据代替实时的碰撞检测。利用该方法在ROS的rvl
2017-11-25 11:47:019 三维移动和两维转动的5 个自由度。 少自由度并联机器人机构其动平台的独立输出运动数小于6。近十多年来,该类机构成为研究的一个热点。这是由于少自由度并联机器人结构简单、造价低,具有良好的应用前最。在许多场合,非期望
2017-10-23 16:24:5015 本论文以螺旋理论为基础,提出一种系统的结构综合方法。根据各条支链对运动平台所提供的反螺旋约束的线性关系,研究了构成五自由度并联机器人机构的各条支链所有可能的运动副组合以及它们的空间几何条件。利用这一方法,设计出一组结构对称的五自由度并联机器人。
2017-10-17 14:51:586 什么是工业机器人的自由度? 通常作为机器人的技术指标,反映机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示。机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度
2017-09-26 16:06:253 六自由度液压运动平台的迭代学习控制_卢颖
2017-03-15 08:00:001 双向中继X信道的自由度研究_党超
2017-03-04 18:07:530 六自由度机器人焊接轨迹研究_张用
2017-03-04 18:04:530 基于ARM的多自由度机械手设计_孙捷
2017-03-01 21:14:332 基于模糊PD算法的三自由度机械臂遥操作双边控制_邱恒
2017-01-21 12:16:517 基于二自由度模型驱动PID的CFB锅炉床温控制_吴丹丹
2017-01-13 21:36:190 永磁转子偏转式三自由度电机电磁系统的建模与分析_李争
2017-01-08 12:03:280 多自由度超声电机驱动威廉希尔官方网站
研究_朱华
2017-01-08 11:20:203 19自由度机器人_动作例程,感兴趣的小伙伴们可以瞧一瞧。
2016-11-17 18:35:231 工业机器人领域的典型设计,本文通过对多自由度的机器人运动控制进行典型的分析研究。
2016-05-25 14:03:399 大专生毕业设计任务书《基于PLC的五自由度喷漆机械手控制系统设计》。
2016-03-18 14:03:5810 为了使六自由度机械臂完成特定的动作, 需要设计计算相应的指令序列. 首先计算了机械臂位姿与指尖位置之间的关系公式, 然后针对机械臂的到达问题、沿曲线运动问题和避障问题, 分别
2012-02-17 16:55:04191 基于MSP430F149单片机设计了一种三自由度转台系统。在该系统中,利用旋转编码器的信息反馈,通过对电机的闭环控制,使三自由度转台能够模拟飞机的飞行姿态。
2011-09-26 13:58:192181 
本文利用Intel 8254设计了一种简单实用的数模转换(D/A)威廉希尔官方网站
,并应用于飞行模拟器三自由度运动平台控制系统中。
2011-08-11 11:42:491143 
SimTec仿真技术公司总部位于德国北部Braunschweig,是一家拥有超过20年历史的国际领先的运动仿真系统制造公司。 SimTec专门电液伺服液多自由度运动模拟系统及运动数据采集系统的的软硬
2011-04-07 16:34:4222 六自由度电磁跟踪系统根据电磁感应的原理来计算出目标的六个自由度参数,从而唯一确定目标的位置和姿态。怎样由接收到的模拟信号计算得到目标的位置和姿态参数是影响整个系统性能的关键所在。在一些早期的产品中对感应天线接收信号的处理主要采用模拟威廉希尔官方网站
和单
2011-01-25 00:11:021041 
本文介绍了由计算机对步进电机控制从而实现多自由度运动的系统的设计。同时详细介绍了系统中的结构组成、软件的应用和步进电机的控制。该控制系统操作界面友好、简单,动
2010-07-21 09:54:0512 三自由度直升机的嵌入式控制系统
三自由度直升机可以应用于飞行器控制系统的半实物仿真试验和性能测试等场合,用以模拟横列式直升机,即倾转旋翼机的直升机状
2010-02-06 09:10:131179 
针对目前手动调整卫星姿态运动仿真设备气浮台时,调节时间过长而且平台浮起部分摆动周期过短的问题,提出了三自由度气浮台自动平衡技术。本文重点推导了三自由度气浮台
2010-01-18 13:52:1719 针对二自由度PID 控制器参数整定困难的问题,提出了一种基于单亲遗传算法的二自由度参数整定方法。运用该算法分别对单自由度PID 控制器和二自由度控制器进行了整定,并与
2009-12-26 13:56:4223 新型三自由度碟型磁浮马达特性量测与改善本计划将针对本校电机系所研制之新型三自由度碟型磁浮马达进行特性量测与改善。此碟型磁浮马达是由具有18 个E型硅钢片之三相交流
2009-11-17 18:13:3238 针对七自由度机械臂远程控制的需要,构建了基于TCP/IP 网络的控制系统。首先通过设计单片机系统实现本地端控制,然后运用WinSockets 类创建基于TCP/IP 的远程控制程序,使连接在Inte
2009-08-15 16:01:4322 分析了欠驱动两自由度机械臂主、被动关节间的动力学耦合特性,指出了被动关节处于不同位置时耦合特性的差异。针对主、被动关节间的动力学耦合特性及其差异,提出了两种
2009-08-04 15:51:3327 三自由度气动机械手的PLC控制
一、实验目的:通过对一个三自由度气动机械手的控制程序的设计,熟悉基于PLC的
2008-09-23 08:19:422987
 电子发烧友App
电子发烧友App
































 工商网监
工商网监
评论