

开发一个控制和编程机械臂的项目
描述
让我们逐步开发一个控制和编程机械臂的项目,模拟工业机器人的基本功能。
第 1 步:规格
机器人有两个基本功能:
程序:记录三个维度的手臂位置(每个记录是一个“步骤”)
运行:依次执行“程序”中记录的位置。机器人将运行程序,直到使用命令“ABORT”。
主要特征:
该项目可用于控制具有 3 或 4 DOF(“自由度”)的机器人。
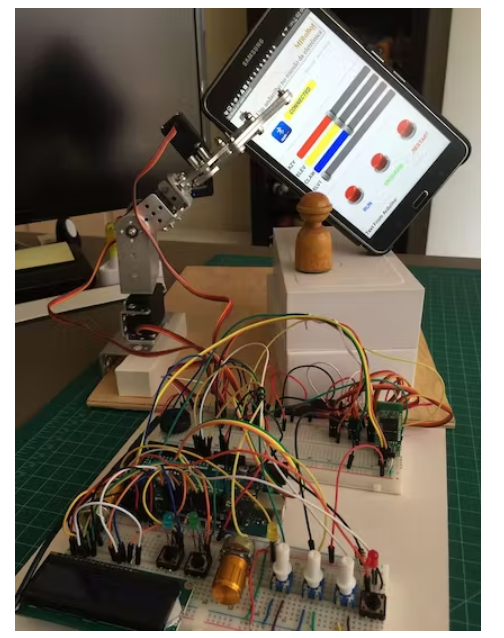
机器人可以在“本地”和“远程”模式下控制(最后一个通过 Android 设备)
在程序阶段,用户可以将控制模式从“LOCAL”更改为“REMOTE”,反之亦然。
将通过彩色 LED、2 行 LED 显示屏和声音(蜂鸣器)向用户提供信息。
声音警报也可以远程触发。
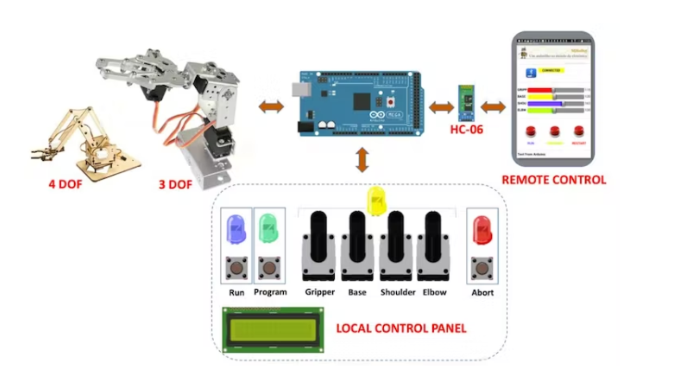
第 2 步:项目
上一步的框图显示了将在此项目中使用的“材料清单”。
我选择了 Arduino MEGA,以免担心可用的 Arduino 端口 (I/O) 的数量。例如,UNO 可以正常工作,但应使用端口扩展方法。有几个选项可以在 Internet 上轻松找到,例如 74138 解码器。
关于蓝牙网络,这个项目使用的是 HC-06。
用于“ remote mode”的Android应用程序是使用MIT Appinventor2工具开发的,该工具是基于Android设备的此类应用程序的强大单一平台。
第 3 步:开发

机械臂可以根据它们拥有的“关节”或“自由度”(DOF)的数量进行分类。
“底座”或“腰部”通常可以将手臂转动 180o 或 360o,具体取决于所使用的伺服类型(在此项目中,使用了 180o 伺服)。
“肩”,负责垂直“抬高或降低”手臂。
“肘”将使手臂“向前或向后”。
“爪”或“抓手”通过打开或关闭来“抓取东西”。
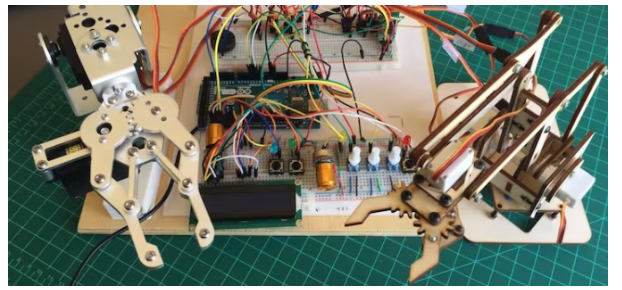
第 4 步:威廉希尔官方网站
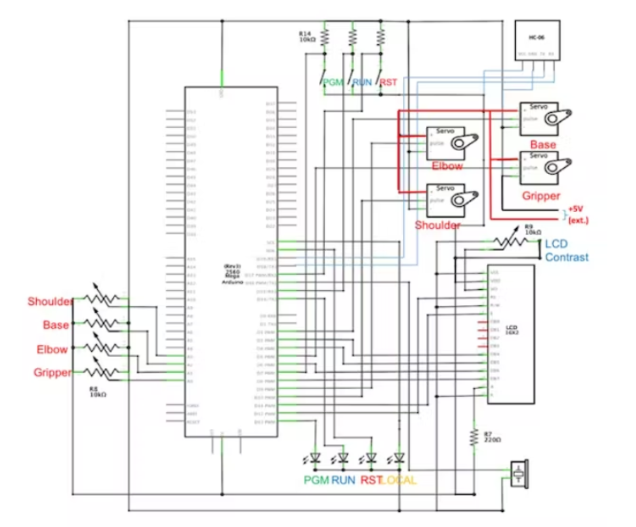
上图显示了完整的威廉希尔官方网站 。
伺服电机将用于驱动关节,直接连接到 Arduino。请注意,在底座上使用“步进电机”以获得更大的扭矩和精度并不少见。舵机的正确选择非常重要。
舵机的直流电源应与 Arduino 和其他组件分开。5 或 6V 的外部电源应该可以正常工作(检查伺服器的数据表以验证正确的电压范围)。一种常见的做法是在 VCC 和 GND 之间使用 470uF 电容器,以最大限度地减少伺服器内部直流电机产生的噪声。确保连接所有“接地”(外部电源与 Arduino GND 引脚)。
如果伺服系统有问题并且振动很大,请在代码的“延迟”处进行调整。重要的是,伺服系统在接收新命令之前有时间到达某个点。同样值得检查的是舵机是数字的还是模拟的,就好像它们在机械上相似,数字的工作频率为 300Hz,而模拟的工作频率为 50Hz。标准 Arduino 库“ Servo.h”是为模拟舵机开发的,必要时可以进行修改,以便更好地使用数字舵机。
第 5 步:代码
这个项目并不复杂,但它有很多变数。最谨慎的做法是明确定义它们并将备注留在唯一的文件中:
ArmDefine.h
该文件还应设置最小、最大和初始伺服角度。本文中包含的代码有两组参数,用于我在项目中测试的机械臂(当然应该只使用一组常量):
// MeArm 4-DOF
#define minGrip 15
#define minBase 0
#define minShou 60
#define minElbw 60
#define maxGrip 45
#define maxBase 170
#define maxShou 180
#define maxElbw 150
#define midGrip 30
#define midBase 87
#define midShou 138
#define midElbw 100
/* SS 3-DOF
#define minGrip 75
#define minBase 5
#define minShou 5
#define minElbw 0
#define maxGrip 125
#define maxBase 150
#define maxShou 155
#define maxElbw 0
#define midGrip 100
#define midBase 90
#define midShou 90
#define midElbw 0
*/
每种类型的手臂都有一组不同的参数,重要的是找到适合自己的。我的建议是,最初电位器(电位器)保持在其中点,PWM 输出的映射设置为默认值:Max = 255和Min = 0(Mid = 126上面的“ #defines”)。然后,开始改变电位器(一个接一个)并在串行监视器(或 LCD)中跟踪手臂正常工作的最小值和最大值。这些将是用于设置的最终值(将我的原始值更改为ArmDefine.h).
为了“记录”机器人应该播放的坐标(或步数)集,我将使用数据数组:
int gripPosition[100];
int basePosition[100];
int shouPosition[100];
int elbwPosition[100];
int positionIndex = 0; // Index to be used at position array used for recorded tasks
请注意,我没有保留“存储”位置,并且在“机器人”程序结束时,索引回到零,机器人将等待新序列的记录(程序丢失)。或者,您可以将这些数据阵列保存在 Arduino EEPROM 中。这样做程序将被再次执行,甚至您可能拥有多个存储的程序。
第 6 步:程序逻辑
主块(“循环”)非常简单:
检查是否使用了执行“程序”(步骤序列)的命令。
如果是这样,请运行它。
否则,“程序”是不完整的,仍然必须编写新的步骤。
如果定义了“新位置”,请将其添加到程序中。
首先,检查来自 Android 设备的到达串行缓冲区的消息。
接下来,验证控制模式是“本地”还是“远程”(默认为本地)。
回到开头并再次执行步骤 1。
void loop ()
{
checkBTcmd ();
defineLocalRemote () ;
execTaskCmd = digitalRead (execTaskPin);
if (execTaskCmd == || HIGH command == "runon")
{
RunProgram () ;
}
else recArmPosition () ;
command = "";
}
函数checkBTcmd()使用来自 BT 模块的单个字符组装一个字符串。这个字符串被传递给变量“ command ”。
函数defineLocalRemote()考虑变量“ command ”检查是否接收到将模式更改为远程的命令,反之亦然。报警命令也在这里分析。对于程序逻辑,如果在Android设备中触发了“Alarm”,则arm一定要进入Remote模式。
函数RunProgram()执行准备工作,打开/关闭 LED 等,特别是调用函数:ExecuteTask()。后者是包含步骤序列的执行逻辑的函数。该函数使用工具将位置数据发送到手臂的“位置索引”增加: armPosition(grip, base, Shoulder, E肘)。
最后,真正指挥舵机并编写“步骤”的函数是recArmPosition()。根据接收到的 Android 命令,该函数将定义舵机的定位,可以通过罐子,也可以通过 Android 应用程序的“滑块”。随着每个位置的变化,此功能使用功能(握把、底座、肩部、肘部)将坐标发送到伺服系统。armPosition在触发“SAVE”或“PROGRAM”命令时,会读取电位器或滑块的实际位置以及相应的伺服激活。在那一刻,数组的位置索引增加并存储步骤。
为了简化理解,所有的代码都是基于它的特定功能。“ Setup”、“ Loop”和上面描述的函数几乎都在文件:MJRoBot_Arm_Robot_Task_Prgm.ino 中,并可在本文下方找到。
更通用的函数如读取 BT 命令:void checkBTcmd();声音发生器:void beep(int pin,int freq,long ms)和去抖:boolean debounce(int pin);存档:General_Functions.ino
一个重要的事实:由于 Arduino 基于 16Mhz 时钟执行指令,预计控制按钮每秒读取数百甚至数千次,因此制作一个设置记录步骤的“去抖动”按钮很重要。
第四个也是最后一个文件是:Arm_Ctrl_and_Display.ino
在这个文件中是电位器的读取函数:bool readPotenciometers() ; 读取 Android 滑块:bool readSliders() ; 伺服系统的放置:void armPosition (int gripp, int basee, int肩部, 肘部 int)。文件中包含的其他功能是用于 LCD 上的数据显示、串行监视器、警报等。
第 7 步:结论
一如既往的是,我希望这个项目可以帮助其他人在电子、机器人和物联网的激动人心的世界中找到自己的道路!
-
基于LabVIEW和SolidWorks改进机械臂的设计流程2015-02-12 0
-
开源工业机械臂开发套件2015-10-23 0
-
开源工业增强型机械臂2015-10-23 0
-
【NanoPi M2申请】六轴机械臂控制开发2016-04-27 0
-
【Pocket-RIO申请】采用labview与FPGA的多自由度机械臂快速控制系统原型开发2016-12-19 0
-
【FPGA开发者项目连载】Gowin Minstar做机械视觉处理的机械臂2021-05-11 0
-
众为兴SCARA四轴机械臂编程概述2021-07-20 0
-
机械臂的控制学习2022-02-23 0
-
【CW32饭盒派开发板试用体验】+机械臂游戏项目(开源)(5)加红外游戏操控机2023-05-24 0
-
dfrobotArduino开发实战-遥控机械臂套装简介2019-11-29 2516
-
使用 Python 和可视化编程控制树莓派机械臂myCobot2022-11-30 5185
-
人臂控制机械臂开源2023-01-31 464
-
如何完成机械臂的运动控制模块2023-02-10 1734
-
构建一个简单的机械臂2023-06-14 499
-
自然语言控制机械臂:ChatGPT与机器人技术的融合创新(下)2024-04-11 886
全部0条评论

快来发表一下你的评论吧 !
