
资料下载


Arduino和微型伺服系统制作的机器人
吴湛
分享资料个
描述
介绍
我想做一个四足行走的机器人,更像是“哺乳动物”的风格,而不是普通的“蜘蛛”或“昆虫”。灵感来自著名的波士顿动力机器人和其他四足研究机器人。制作这样的机器人非常具有挑战性,因为它很容易因为重心高和脚在身体下方而翻倒,而不是伸展到角落。
目的是使用 Arduino 和低成本的微型伺服系统制造一个廉价的机器人。这个解决方案当然有它的局限性。不能指望它是完美的,但我现在已经设法制造了一些机器人,它们可以执行这部电影中描述的步行行为。用很少的预算做最好的事情本身就是一个挑战,也许是那些从事资金雄厚的研究项目的人永远不必面对的事情。:)
很早就发现,需要对反向运动学 (IK) 进行研究以使其正确。该代码具有一组方程式,可根据所需的脚部运动计算关节角度。这些可以进一步用于一些重复性任务的功能,例如进行身体运动(将四只脚向相反方向移动)和进行完整的脚部运动(向上抬起以指定方向移动并再次放下)。
下一个挑战是进行步态研究,即根据身体和足部运动定义机器人应该如何行走和转动。我的机器人一直使用静态稳定的步态。当时一只脚被抬起并放在一个新的位置。身体靠在其他三只脚上,为了不翻倒重心,必须保持在这些脚形成的三脚架内。我开发了四种标准步态——向前、向后、向左和向右。这反过来又利用足部和身体运动功能组合成一个完整的序列。
我还设计了一个同步伺服运动的功能。在某些情况下,几个伺服器在设定的时间内做出不同的冲程。这必须同步以实现平稳的运动。
最后但同样重要的是,我使用了完全不受保护的锂聚合物电池。这可能是有风险的,主要的危险是放电过快或过深。只要没有意外短路,就可以避免第一个危险。普通 R/C 电池的放电率为 25 C,在这种情况下允许 12 A。UBEC 将防止其在任何情况下高于 2 A。软件中的监视功能可以防止第二种危险。在其中一个模拟引脚上测量电压,如果低于 7.0 V,机器人将停止工作。
最后,我必须强调,电池应该使用专用充电器充电,并应小心处理,切勿让充电无人看管。电池应从机器人上拆下(使用魔术贴安装)并在防火袋中充电,或至少与易燃材料保持安全距离,以免火势蔓延。还要安全地存放电池。
如果您不熟悉 LiPo 电池,请咨询当地的 R/C 爱好商店并购买电池以及合适的充电器,可能还有用于充电和存放的防火袋/容器。这些物品通常充满警告标志。重做它们并使用您自己的良好判断力。:)
构建机器人
根据提供的文件打印零件。花点时间看一下图片,并在开始之前弄清楚如何组装零件。我是斯堪的纳维亚人,但这条指令与宜家或乐高指令的水平相差甚远 :)
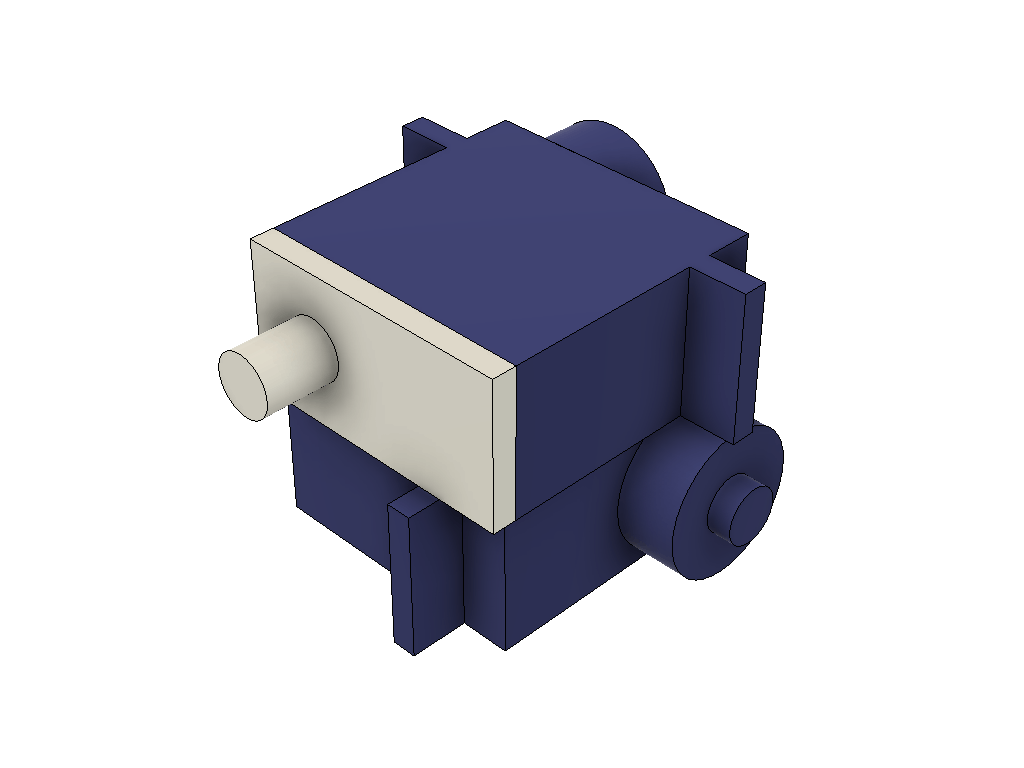
首先应组装髋关节。我使用质量好的双面胶带连接零件。它们也可以用胶水粘合,但如果需要修复无法拆卸的损坏部件,一个损坏的伺服系统会导致更换整个接头。
将伺服支架放在一个伺服的底部,与驱动轴对齐。然后加入另一个轴垂直的伺服。下图显示了前后左右的髋关节。对于另外两个角,应制作镜像接头。
在继续之前,最好确保所有 12 个舵机都居中。最好的方法是组装 PCB(或面包板,见下文),连接所有伺服系统并加载代码。当 Arduino 启动时,所有舵机将居中(命令信号 90 度)。机器人组装完成后,将需要稍后微调中心位置。
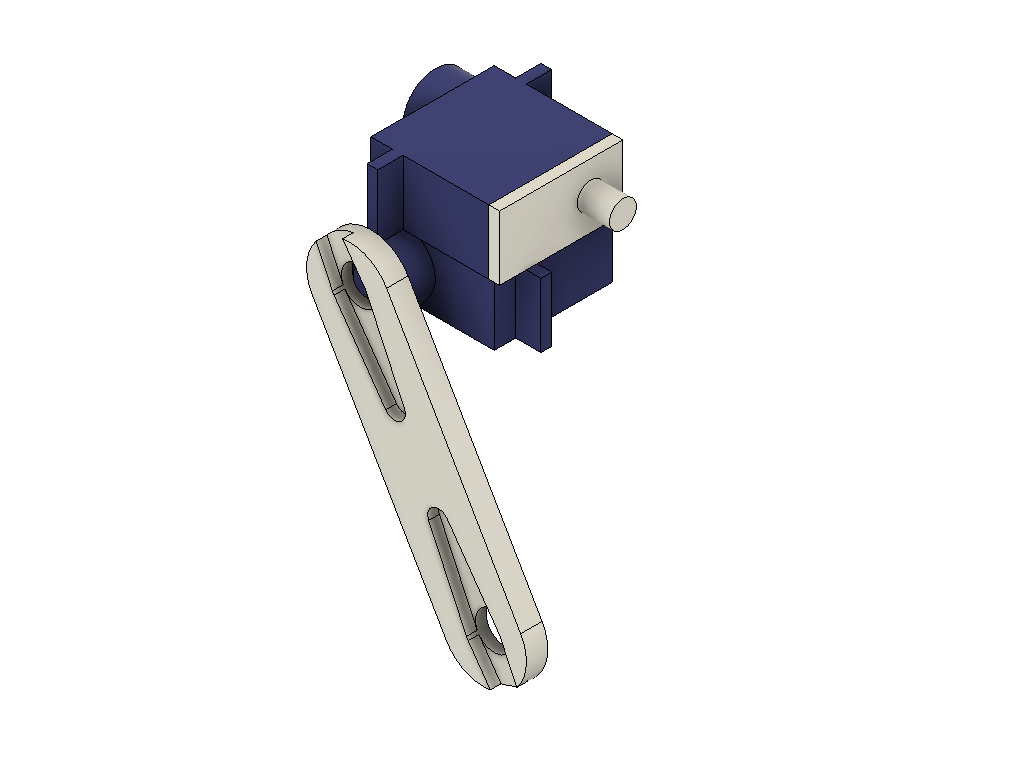
下一步是连接称为大腿的部分,即腿组件的“上肢”。该部件具有与通常与伺服一起交付的伺服喇叭装配在一起的凹槽。将喇叭粘在凹槽中。确保使用胶水来连接 3D 打印材料和喇叭制成的尼龙塑料。我用的胶枪效果很好,但我在使用 CA 胶水方面取得了一些成功(有些品牌有效,其他品牌无效)。
大腿以 60 度角与髋关节相连。当舵机居中时,尝试找到一个尽可能接近该角度的位置。用提供的螺丝(通常是随伺服提供的三个中较短的一个)将喇叭固定到伺服花键上。下面是两张组装好的大腿和臀部的照片,为了清楚起见,伺服喇叭没有包括在内(或者从我这边的懒惰出发从未建模)。
腿的下部也应组装。在这种情况下,伺服系统使用螺钉连接到腿部。随伺服提供螺钉(通常是两个较长的“木”螺钉)。
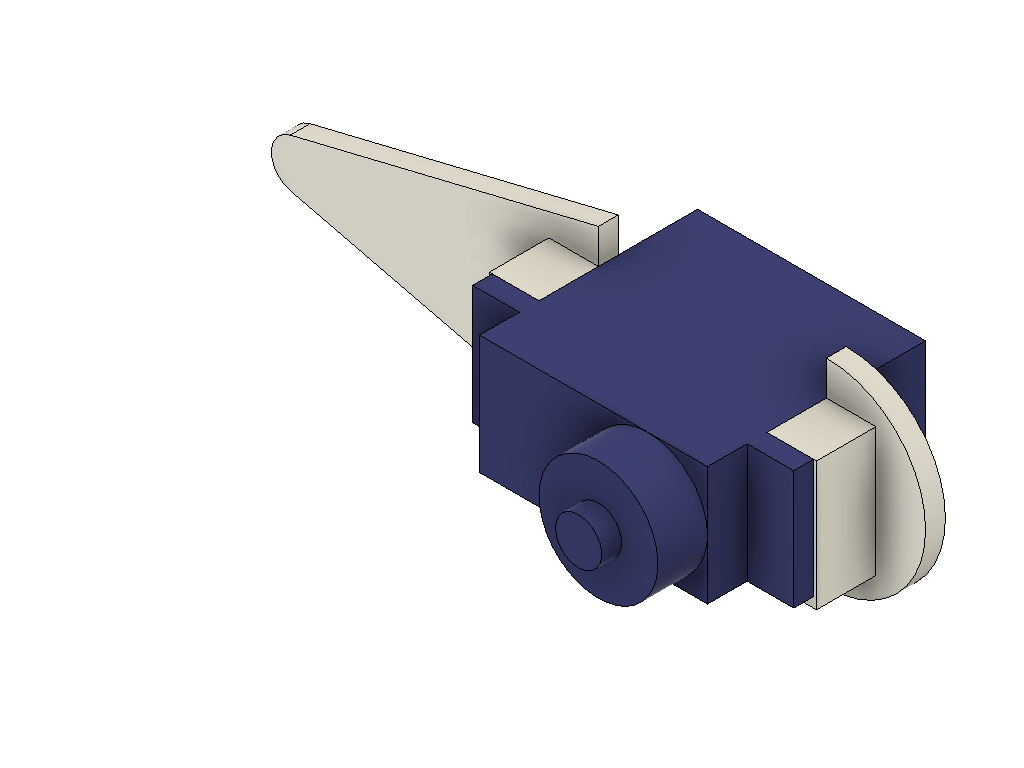
现在可以将腿组装到身体上。我称之为“保险杠”的两个部分位于机器人的前部和后部(就像汽车上的保险杠)。它们有伺服喇叭的凹槽,就像大腿部分一样。将角粘到它们身上。然后将大腿的伺服支撑滑入身体的相应孔中。当这在两侧都完成时,该组件可以由保险杠固定。让腿以大约 12 度的角度向外突出(腿的脚趾向外 20 毫米)。保险杠通过使用剩余的(较长的)伺服螺钉固定在车身上。
最后可以连接机器人的小腿。它们应该与大腿相反的方向倾斜,使脚尖正好位于每个腿组件的髋关节下方。
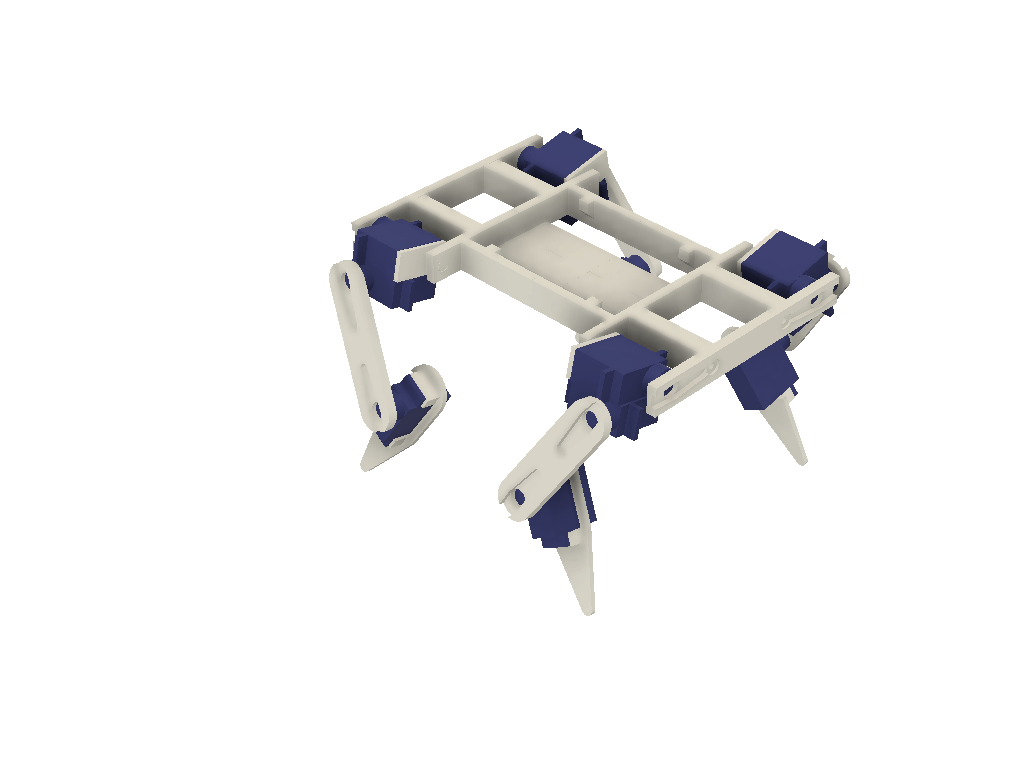
这样机器人就组装好了。它应该如下图所示。请注意,与顶部图像和电影剪辑相比,机器人的设计略有变化。车身经过重新设计,以简化并打造更坚固的设计。髋关节的伺服支撑和喇叭交换了位置。所以根据3D图像组装,避免被照片和电影剪辑混淆。
当然,每个关节的角度不可能完全符合要求的角度,SG-90 舵机上的花键数量为 21,导致两个位置之间的角度为 17 度。您最多可以在 10-20 度范围内组装机器人,剩余的误差必须通过更改代码中的中性位置来调整,请参阅本说明的进一步内容。再次连接所有伺服系统并启动 Arduino 并检查中性位置并在需要时进行一些机械调整(移动一个或两个样条线)可能是个好主意。与伺服系统一起工作时,往往会意外转动伺服系统。
连接电子设备
有两种选择,将所有东西都放在一个面包板上,或者使用提供的 Fritzing 文件生产 PCB。如果在将所有电源线和地线连接到伺服系统时不小心,您可能会遇到面包板中的电压问题。在极端情况下,一台伺服器可能会消耗 600 mA 的电流,而不良的连接会导致行为不稳定。PCB 的电源线有非常宽的铜迹线,因此如果您正确焊接,它将正常工作。
我的设计中没有电源开关。只需连接电池即可开启和关闭机器人。如果你想添加一个,它应该在电池连接器之后,切断 Arduino 和 UBEC 的 7.4 V 电源。
面包板版本
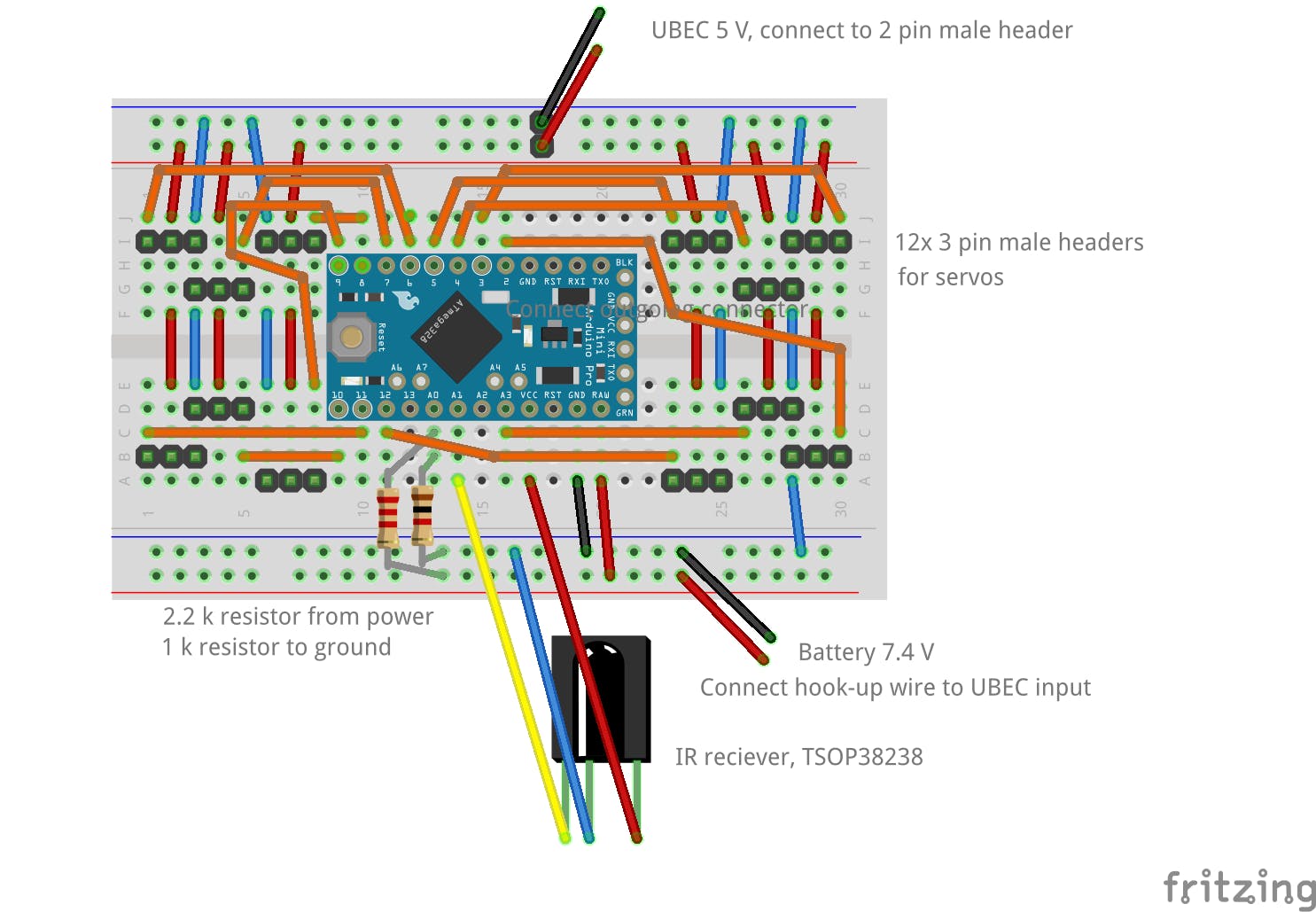
可以将 Pro Mini、伺服连接器和大多数其他电子设备放在一个半尺寸的面包板上。我在下图中绘制了示意图。确保使用短跳线,尤其是用于伺服系统的 5 V 电源和接地连接。伺服连接器只是超长的公头,被切成三块并压入面包板。
图片中没有显示的是电池和UBEC。可能有一些焊接来解决这个问题,以便将连接器配件连接到电池上。从连接器两根跳线应连接到面包板的下部“电源轨”,以便为 Pro Mini 供电(连接到 RAW 和 GND)。还将两个电阻从 7.4 V 电源连接到 A0 引脚。2.2k 来自正极,1k 来自地面。这会将电压(满电池时超过 8 V)分压为低于 5 V 的值,该值可由模拟引脚测量。
UBEC 的输出端有一个伺服连接器。在上面的“电源导轨”上加一个两个公头是相当方便的。把它放在中间的某个地方,如图所示,以确保伺服系统的功率分配尽可能平衡。
IR 接收器应连接到 A1 并具有 5V 电源。接收器上的针脚足够长,可以直接插入面包板上的孔中。
下面有一个示意图和一张关于成品面包板外观的图片。请注意,图片显示了具有不同引脚和连接的旧版本机器人。它仍然提供了如何连接跳线和伺服连接器的想法。
面包板通过其自粘背面连接到车身上。定位它,使伺服系统连接到引脚 D3、D4 和 D5(示意图中的右上角)的角位于机器人的前/左角,并确保威廉希尔官方网站 板位于身体的中心(正确的中心重力至关重要)。
PCB版
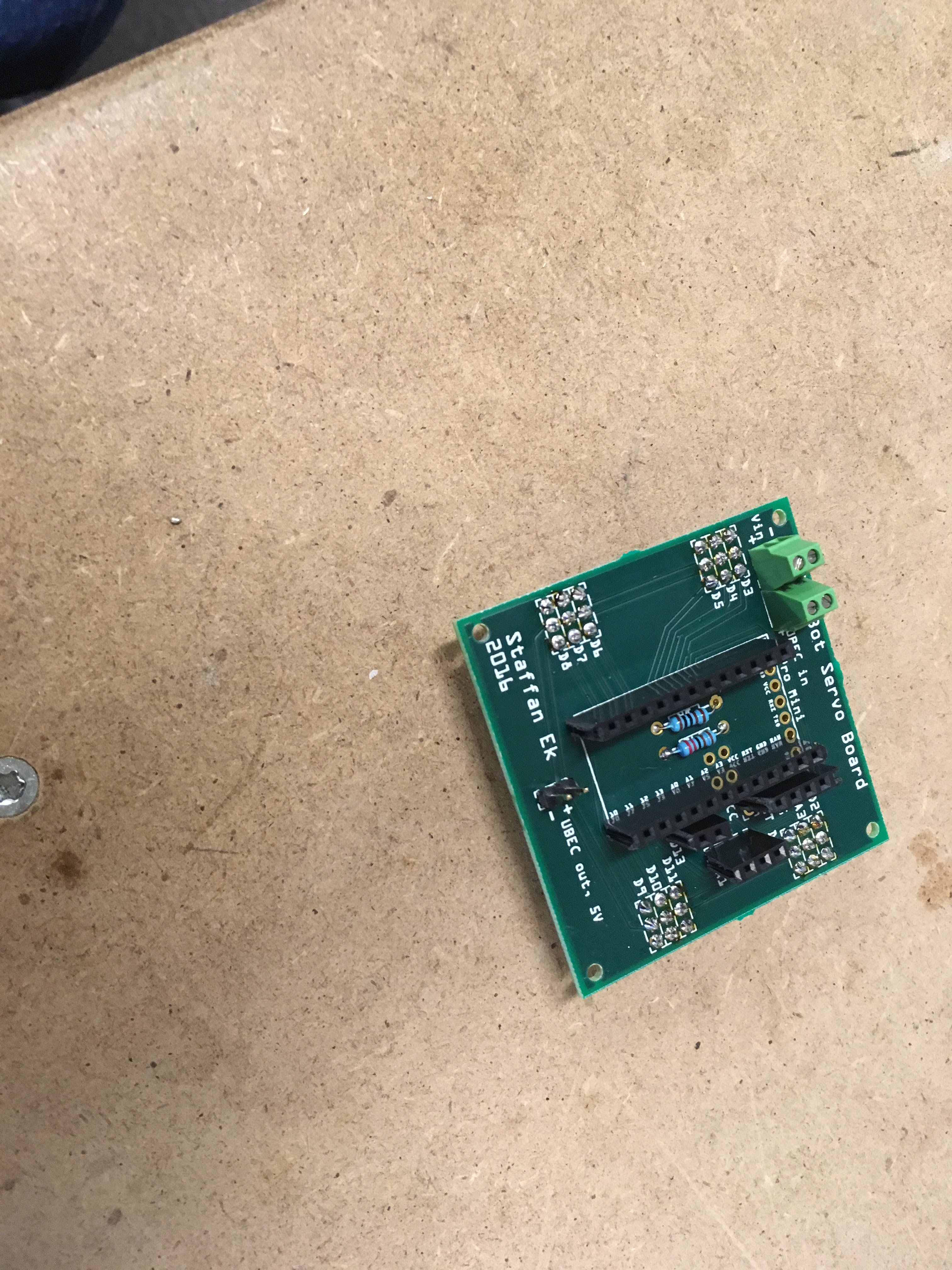
我在下面添加了一个 Fritzing 文件。这可用于生产 PCB,可以通过从 Fritzing 提供的服务订购,也可以通过导出用于 PCB 制造的文件。我做了一系列图片来展示下面的组件。PCB 是为这个机器人定制的,带有连接到所有伺服、IR 和电压测量的连接器。但也有从其余引脚断开的连接器。如果您将来想扩展机器人,这些可用于连接其他设备。
身体上有一些小的“垫子”,可以贴合 PCB 的角落。同样在这里,带有 D3 到 D5 连接器的角落应该在前面/左侧。PCB上有安装孔,但我只在机身上使用了一块双面胶带来固定它。它会留在原地。
电池
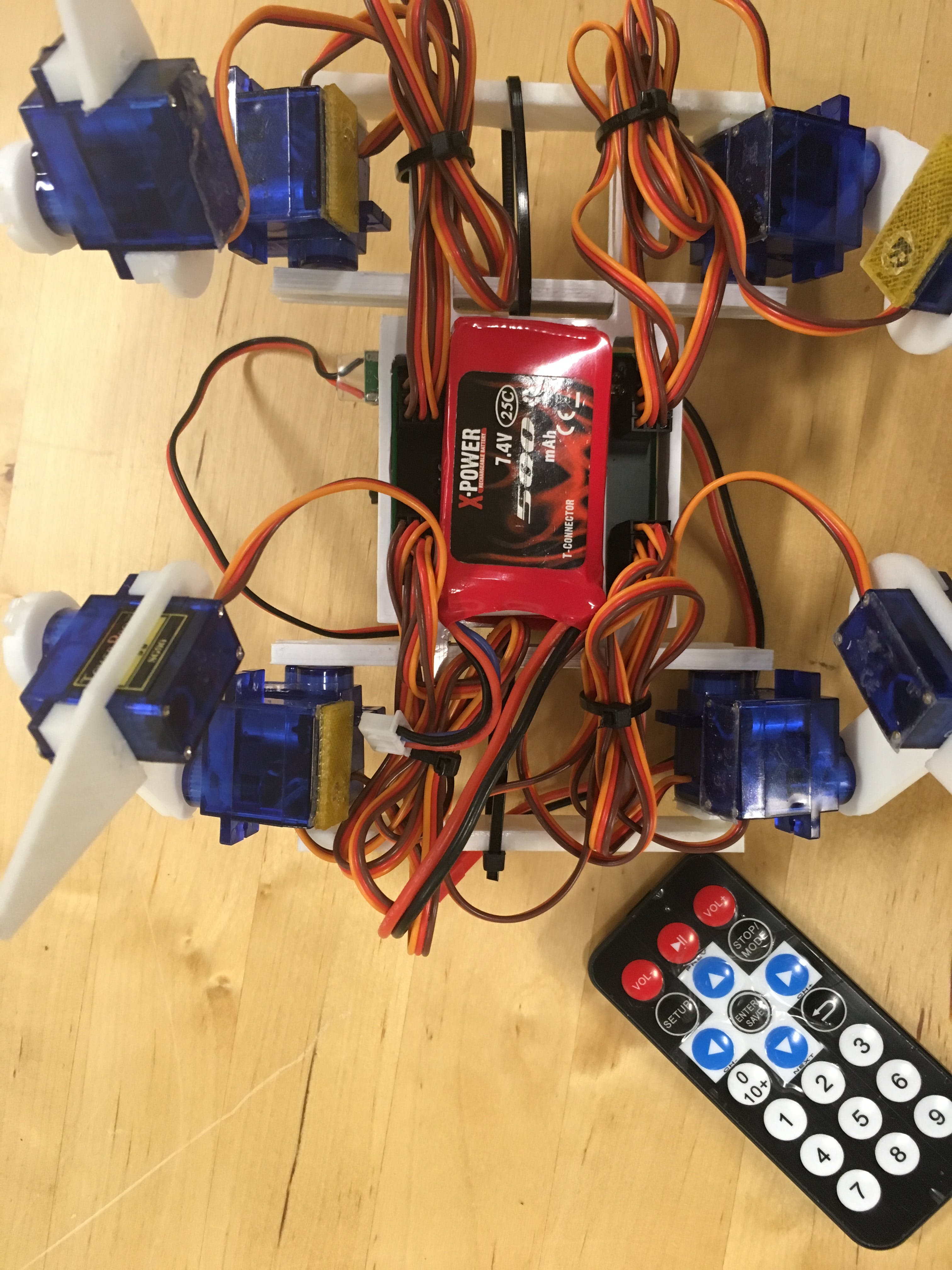
电池用魔术贴固定在底部。身体上有专门用于此的平面。7.4V/500mAh LiPo 电池的外形尺寸通常约为 55x30x10 mm(上下几毫米),非常适合这个地方。

最后,机器人可以通过将伺服线捆成漂亮的束来“修饰”,这样它在行走时就不会被它们绊倒。它还使机器人看起来实际上是一个四足行走的生物,而不是一堆伺服线。:)
敲定
在使用机器人之前,应微调中心位置。这是通过在代码中编辑数组 serverdeg0 来完成的:
const float servodeg0[12] = {90, 90, 90, 90, 90, 90, 90, 90, 90, 90, 90, 90};
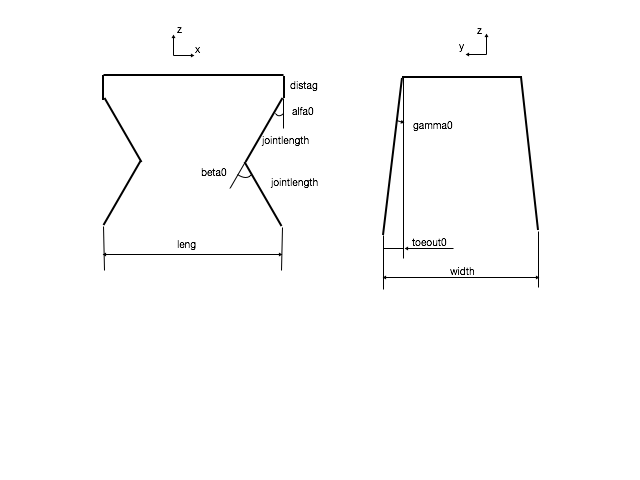
这些值的顺序是 alfa、beta gamma 和前/左、后/左、前/右、后/右。所以右前方的 beta 是数组中的第八个位置或者是serveddeg0[7](数组的编号从 0 开始)。
还有一个称为servodir 的数组定义了舵机的旋转方向。
const int servodir[12] = { +1, +1, -1, -1, -1, +1, -1, -1, -1, +1, +1, +1}; // Turning direction (positive is servo counter-clockwise)
我使用的舵机逆时针方向从 0 度移动到 180 度。我在某处读到有伺服系统朝另一个方向前进。在这种情况下,数组servodir 必须始终更改其符号。
启动 Arduino 并检查所有伺服系统的角度。采取措施,看看一切看起来都是直的和对称的。距离和角度应根据下图。
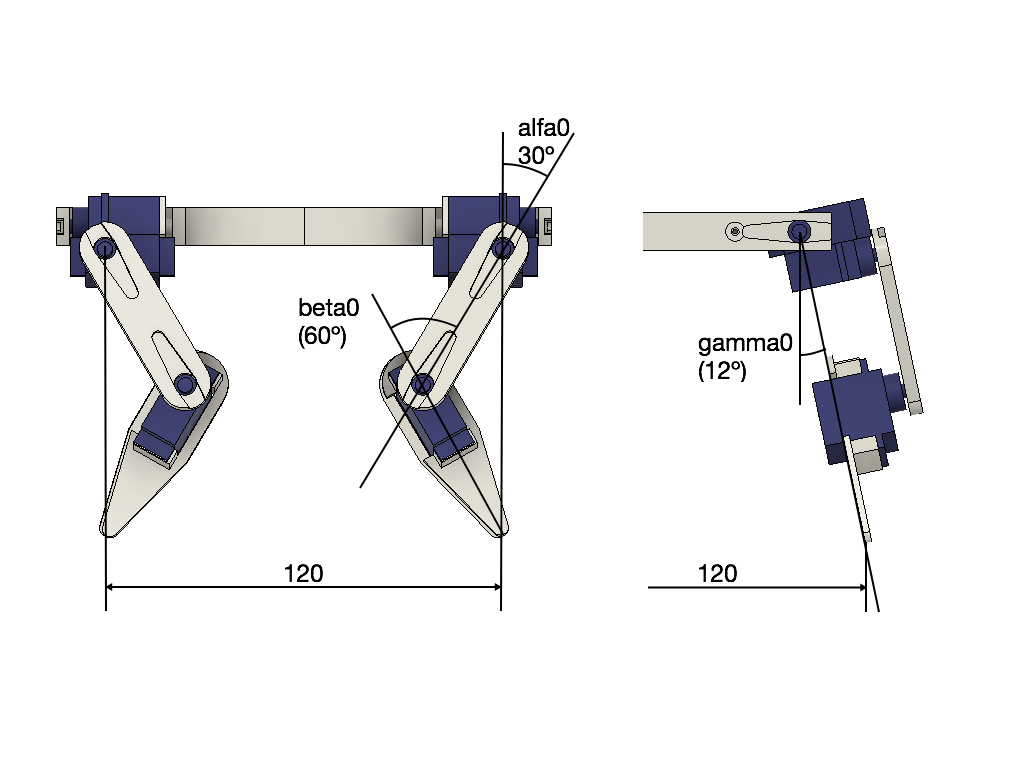
每次测量很难在精确的毫米范围内,在厘米范围内是合理的。查看需要哪些更改并将它们添加/减去数组servodeg0中的值。在一切正确之前,这肯定需要几次迭代。你将以一个看起来像这样的servodeg0数组结束(我的一个机器人的一段实际代码)。最重要的是,你最终应该拥有一个四足支撑并笔直站立的机器人。
const float servodeg0[12] = {80, 95, 100, 100, 110, 90, 100, 115, 100, 80, 80, 100};
现在一切都结束了。享受!
可能只是路上的一些提示。
一段时间后,伺服系统可能需要重新校准。中心位置会随着时间而漂移。只需不时检查所有内容是否对齐。
如果您已将所有内容都正确,但仍有一个机器人会翻倒,请检查重心。可以移动电池来平衡这一点,使用魔术贴是一件好事。
再一次。小心对待你的锂聚合物电池。
进一步改进
通过在这里提交我的机器人,我还邀请人们改进设计,或者添加更多功能,或者做一个稍微不同的布局(更大、更小、更酷)。该代码应该可以在布局或大小略有不同的机器人上重复使用。下面的草图显示了代码中的不同常量。如果制造了具有不同措施的机器人,所有 IK 和运动功能应该仍然有效。它还显示坐标已定义,x 指向正向。
当然,如果人们为机器人添加功能会很有趣。遥控器上有几个按钮可以被赋予功能(如果按下按钮,为什么不跳舞或做一些其他的动作)。
我个人尝试模拟输入。我还使用了“走路时转身”的步态,以便能够在一定程度上引导机器人,或者在陀螺仪或指南针的帮助下纠正路线偏差。我还添加了一个超声波传感器和自主行为(避开障碍物)。我目前的项目是将模拟控制与自主相结合,并通过智能手机控制一切。这迫使我学习了很多新东西(Blynk、ESP6822、设备之间的串行通信等),希望我能推出一个改进版的机器人(或者也许有更好技能的人在这方面打败了我):)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






