
资料下载


从BT到WiFi:创建WiFi控制的Arduino机器人车
分享资料个
描述
在我的项目 智能手机控制的 Arduino 4WD 机器人车我展示了智能手机控制的 Arduino 4WD 机器人车或蓝牙 Arduino 机器人. 然后我决定用蓝牙控制的机器人制造一辆 Wi-Fi 控制的机器人汽车。为此,我简单地移除了蓝牙模块并添加了具有相同有线连接的 NodeMCU(已经创建了适当的 Andriod 应用程序)。
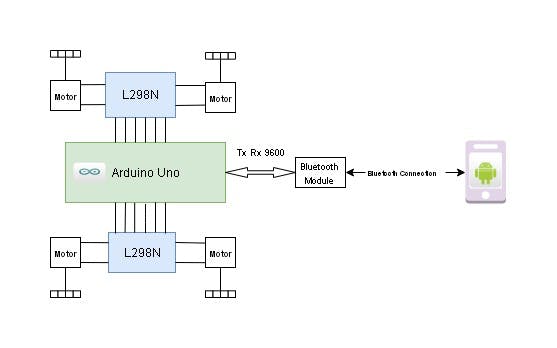
NodeMCU ESP8266 在访问点模式下工作,以便在没有工作 Wi-Fi 网络的露天控制机器人汽车。
这个怎么运作。首先,我们必须连接到 Wi-Fi Robot 网络并打开 Wi-Fi Robot Andriod App。当按下前进按钮时,智能手机发送获取请求http://192.168.4.1/?State=F。然后,正如我们在 NodeMCU 的草图中看到的那样:
if( server.hasArg("State") ) { Serial.println(server.arg("State")); }
NodeMCU 向串口发送“F”。当 Arduino Uno 板通过串口接收到“F”时,它会启动void goAhead():
if (Serial.available() > 0) { command = Serial.read();
switch (command) { case 'F':goAhead();break;
按下前进按钮时,机器人停止。蓝牙机器人小车改造成Wi-Fi的基本步骤:
- 移除蓝牙模块
- 安装 NodeMCU ESP-12E 开发套件板
- 在 Arduino IDE 中上传 Arduino Uno 板和 NodeMCU 板的草图
- 将 Tx、Rx、+5v 和 GND 线连接到 NodeMCU
- 安装并打开安卓应用
- 将您的智能手机连接到 WiFi 机器人网络(无需密码),享受驾驶机器人汽车的乐趣!
步骤 1. NodeMCU

这款 ESP-12E 模块内的 ESP8266 SoC 开发板开箱即用,您可以将其连接到计算机、安装 USB 驱动程序并开始编写连接到 Wi-Fi 网络的程序!
步骤 2. 在 Arduino IDE 上安装 NodeMCU 板
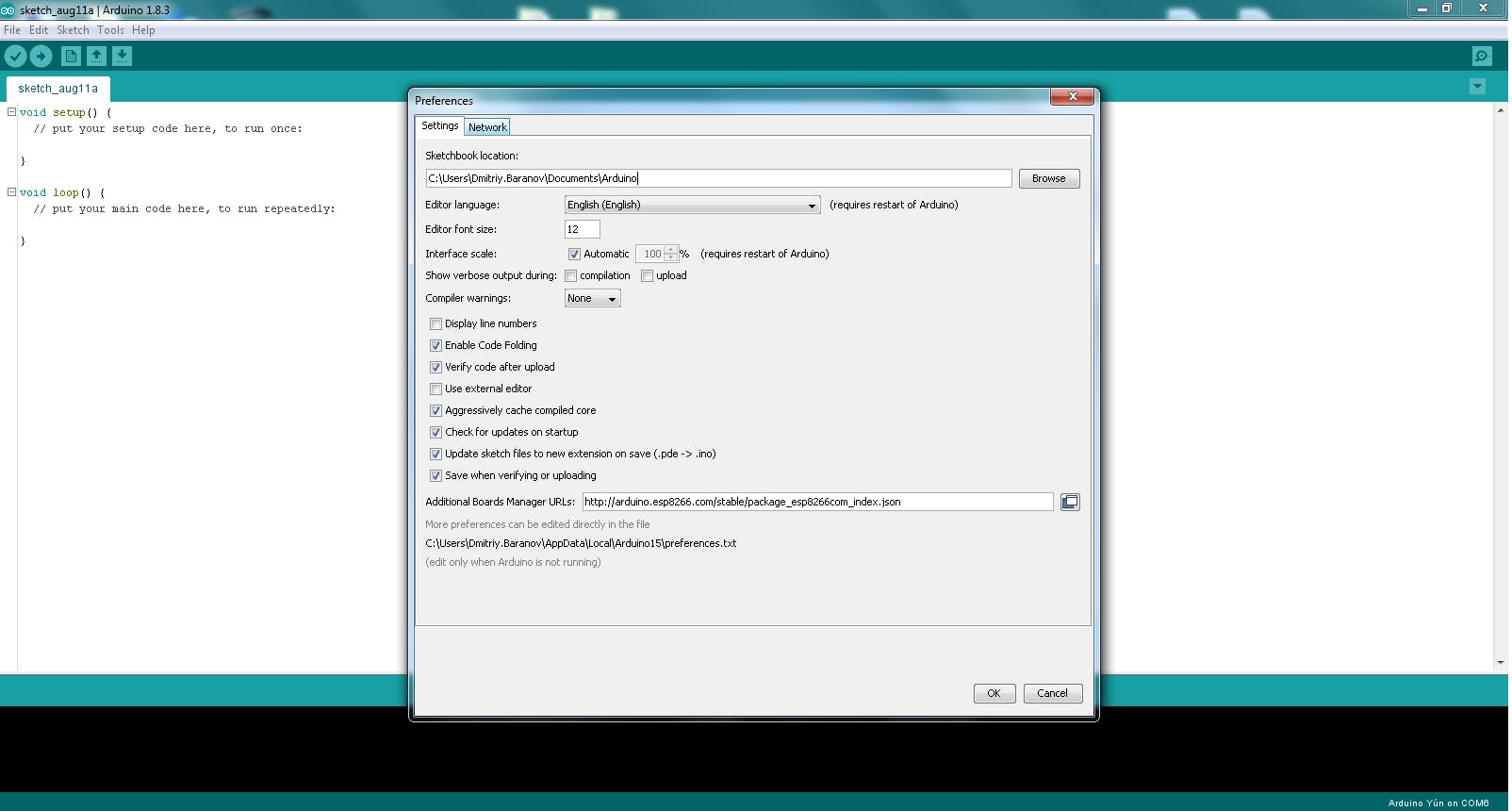
- 在 Arduino IDE 中打开 Preferences 窗口并在 Additional Boards Manager URLs 字段中输入 URL:然后单击OK 。
- 在 MENU 中选择:Tools → Board → Boards Manager并向下滚动并选择 esp8266 by ESP8266 Community 并单击INSTALL 。安装大约需要 3 分钟。
- 安装 USB 驱动程序(在我的情况下为 CH340)。
- 重启 Arduino IDE 并从菜单选项中选择我们的开发板:Tools → Board → NodeMCU 1.0 (ESP-12E Module)。
- 然后,我们指定正确的 CPU 频率(工具 → CPU 频率→ 80MHz)和上传速度(工具 → 上传速度 → 115200 )。
- 为端口选择正确的选项(工具 → 端口 → COM5 )。
现在我们已经准备好上传我们的 NodeMCU 草图了!
步骤 3. 上传 Arduino Uno 板和 NodeMCU 板的草图
在上传之前不要忘记从菜单选项中更改我们的板子选择:
- 工具 → 开发板 → NodeMCU 1.0(ESP-12E 模块)或
- 工具 → 开发板 → Arduino/Genuino Uno
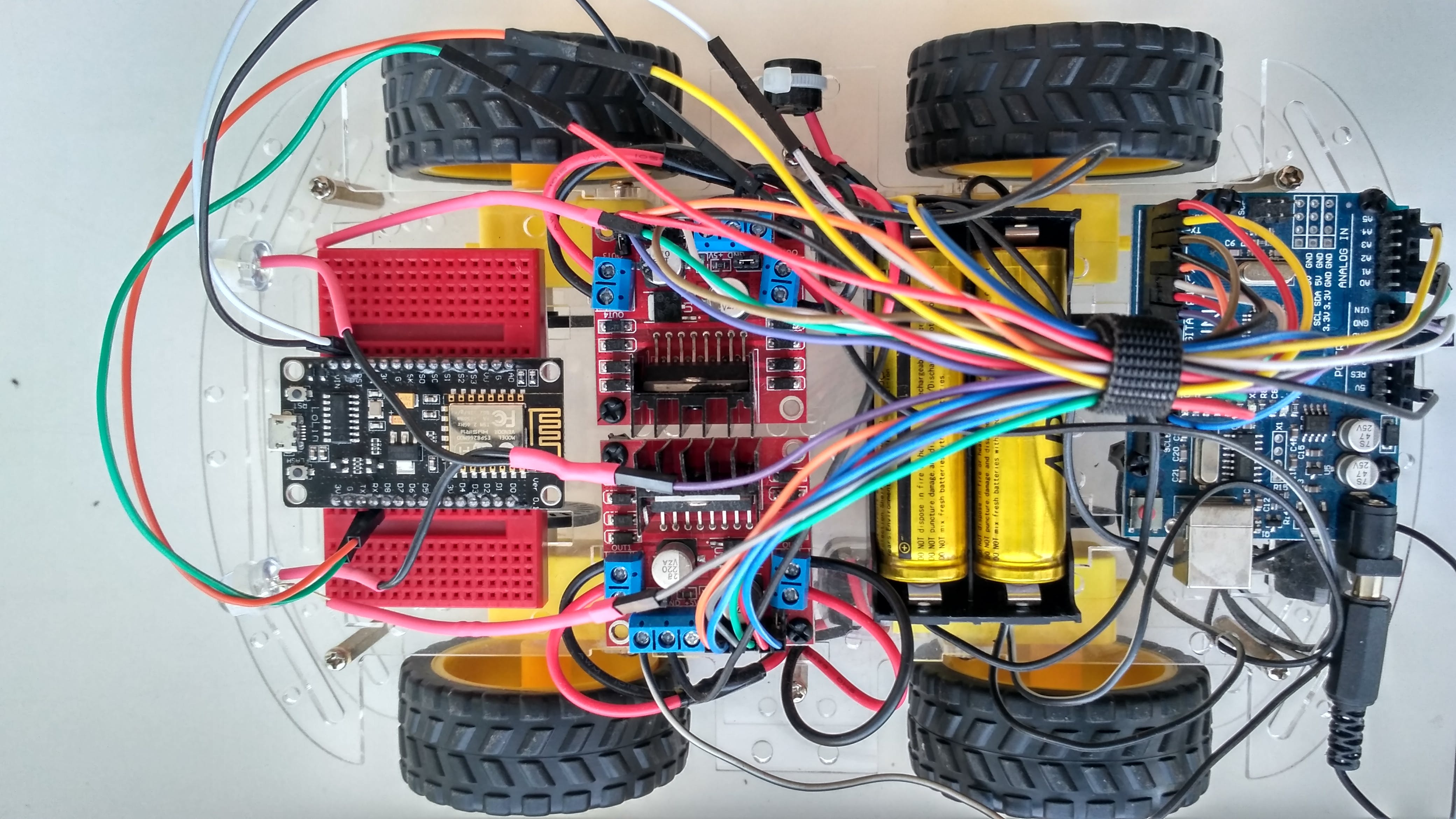
步骤 4. 接线
上传草图后,我们可以将 Tx、Rx 线连接到 NodeMCU 板以及 +5v 和 GND 线。
第 5 步。Andriod 应用程序并完成!
安装我的应用程序(Wifi 机器人 #4)。
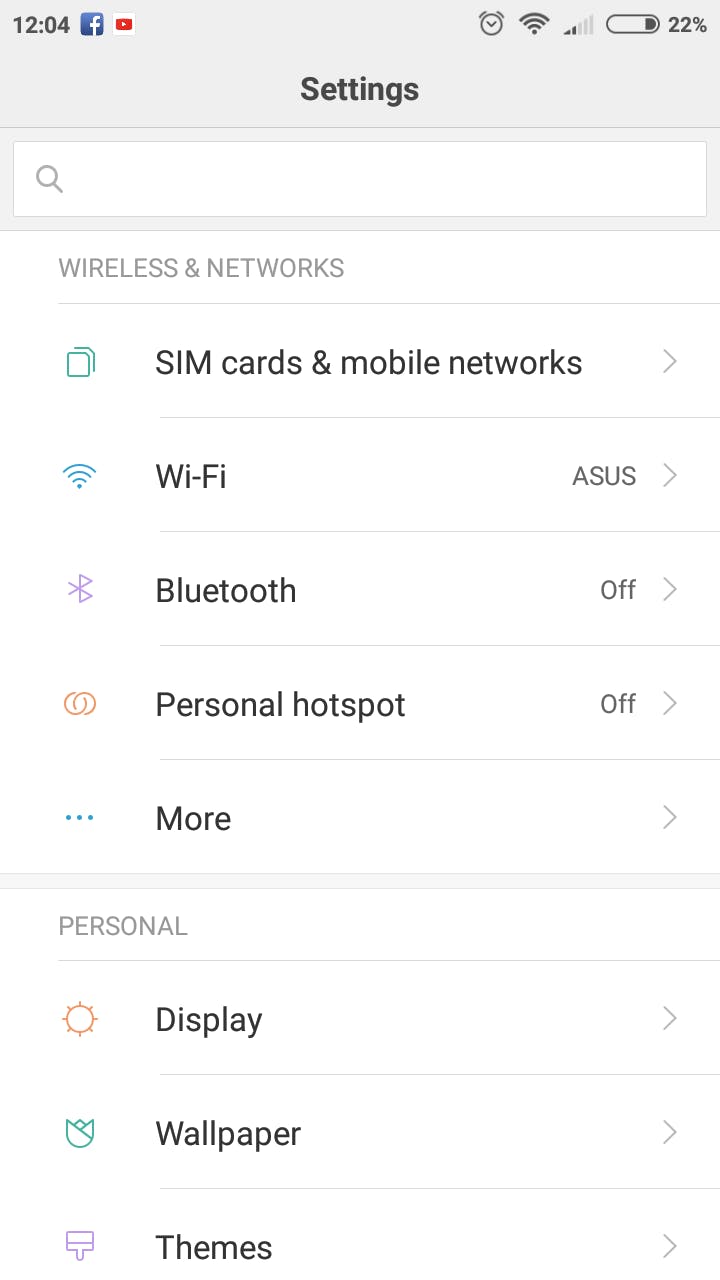
启动您的 Wi-Fi 机器人车,进入智能手机的 Wi-Fi 设置并选择 Wi-Fi 机器人网络(无需密码)。连接到 Wi-Fi 机器人网络后,打开应用程序并享受驾驶 Wi-Fi 机器人车的乐趣!
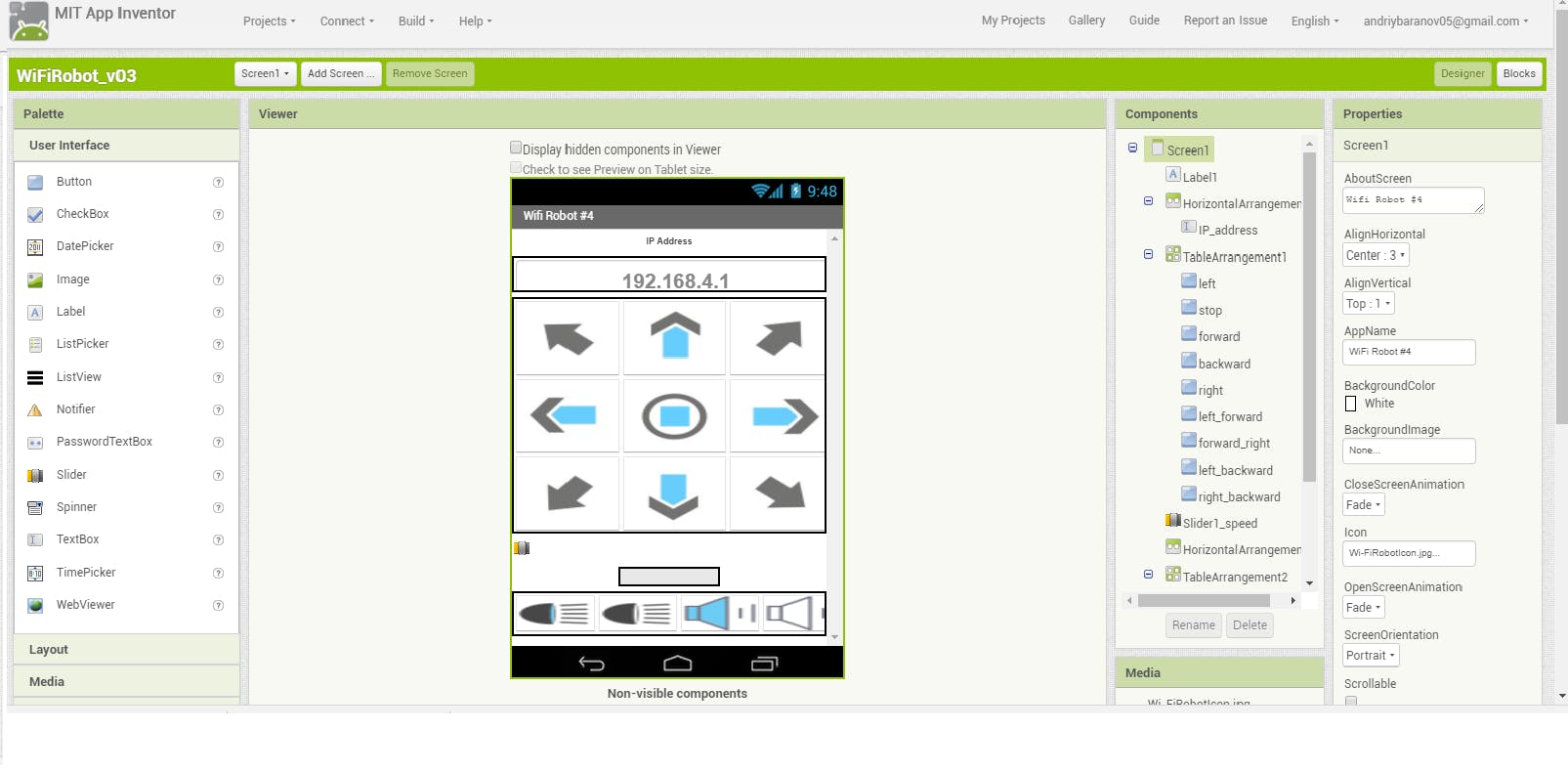
该项目的 Andrioid App 是在 MIT App Inventor 中创建的。您可以使用 .aia 文件随意更改它。
我将不胜感激建设性的建议和愿望!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






