

Q&A | 关于高级硬件在环(HIL)您想要了解的十个问题
描述
HiL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器运行仿真模型来模拟受控对象(比如:汽车、航空飞机等设备)的运行状态,以此判断电控模块的性能。虹科Orolia GNSS模拟器带来优秀的HIL仿真测试方案。
Q1:什么是HIL?
硬件在环(HIL)仿真是一种用于测试导航系统的技术,其中测试前并不知道车辆轨迹。在这种情况下,车辆轨迹被实时馈送到GNSS模拟器。HIL可用于复杂实时系统的开发和测试,如卫星控制系统、军事战术导弹、飞机飞行控制和汽车系统。
虹科Orolia GNSS模拟器的HIL设置允许用户实时发送真实的车辆轨迹,并生成相应的GNSS射频信号。
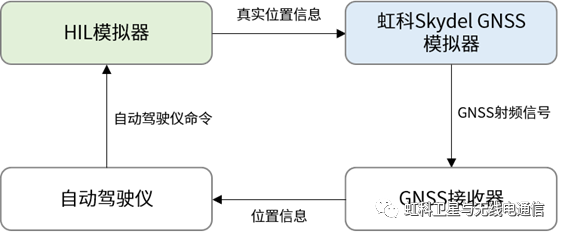
上图描绘了一个闭环,其中真实位置传输到系统中,自动驾驶仪应用命令实时影响车辆轨迹。系统中的HIL模拟器和虹科Orolia Skydel GNSS模拟器造成的附加延迟必须足够小,来保障不会对自动驾驶仪和GNSS接收器性能的测试和测量产生负面影响。
Q2:使用虹科Orolia Skydel/GSG-8 GNSS模拟器时,如何验证HIL仿真性能水平?
使用虹科Orolia Skydel时检查HIL模拟性能水平的最佳方法是使用性能图和HIL图,这些都是功能强大的可视化工具,旨在帮助用户验证HIL解决方案是否完全按照预期工作。
Q3:虹科Orolia Skydel/GSG-8 HIL系统延迟是怎样的?
随着虹科Orolia Skydel 22.5版本的发布,HIL延迟可以减少到10ms。使用时间戳和公共时钟源,延迟是一定存在的。而虹科Orolia Skydel优秀的性能和HIL选项使之成为优化任何硬件(虹科Orolia GSG-8或其他自定义硬件)延迟的最佳诊断工具。
Q4:将虹科Orolia Skydel模拟器集成到HIL环境中需要哪些硬件/软件/组件?
要将虹科Orolia Skydel模拟器集成到HIL环境中,需要以下要素:
- 分布式时钟参考:以确保HIL模拟器上的操作系统和虹科Orolia Skydel模拟器使用PPS和10MHz在数百微秒内紧密同步;
- Linux操作系统:对于实时应用程序,建议在Windows上使用Linux,Linux应配置为使用精确时间协议(PTP)将时钟与分布式时钟同步;
- 虹科Orolia Skydel HIL客户端:这是一个提供简单API的库,虹科Orolia Skydel HIL客户端需要以太网连接,大多数命令使用TCP/IP,真实位置数据使用UDP;
- 虹科Orolia GSG-8或类似的自定义硬件来运行Skydel,虹科Orolia GSG-8预先配置了Linux以获得最佳性能。
Q5:使用零有效延迟功能时,Skydel会将位置推断到未来多远?
Orolia Skydel使用先进的技术来利用CPU和GPU的处理能力,其成本仅仅是几毫秒的小延迟,称为引擎延迟。另一个延迟来自HIL模拟器发送接收器轨迹样本的速率和网络延迟本身,推荐HIL模拟器在单独的计算机上运行,为了补偿累积的延迟源,Skydel的经验法则是在未来使用时间偏移进行外推,时间偏移是引擎延迟、HIL采样间隔和网络延迟的总和,由Skydel中的Tjoin参数表示,并由用户进行配置。
Q6:可以在Skydel中禁用轨迹外推吗?
可以,可以选择提供未来的位置,以便Skydel在采样之间进行插值,而不是实时向模拟器提供当前位置。
Q7:Skydel软件是否提供HIL测试选项?
是的,我们提供可选软件许可证。
Q8:虹科Orolia Skydel中的HIL测试与其他解决方案有何不同?
虹科Orolia Skydel是最具创新性的GNSS和PNT测试解决方案,它具有非常低的延迟,不需要昂贵的附加组件。最重要的是能够通过内置测试功能高效设置时间,该功能可快速识别问题并验证优化性能。HIL图提供了对HIL子系统集成的洞察,并能够找到其他解决方案中未量化和未说明的问题。
Q9:选择模拟器进行HIL测试时,有哪些需要考虑的关键因素?
添加HIL和GNSS模拟器后增加的可接受延迟
- HIL模拟器位置更新率
- HIL设置时钟源
- 可用数据(时间、位置、速度、姿态、角速度等)
Q10:使用HIL选项有哪些优势?
- 零有效延迟:虹科Orolia Skydel推断位置以补偿延迟
- 使用速度和加速度的外推
- 延迟减少到10ms
- 显示系统性能的新图表
-
Elecfans高手问答Q&;A——单片机C语言编程2014-08-19 0
-
Elecfans高手问答 Q&;A——fpga的逻辑编程设计2014-08-19 0
-
Elecfans高手问答 Q&;A——硬件威廉希尔官方网站 设计2014-08-19 0
-
Elecfans高手问答 Q&;A——labview设计2014-08-19 0
-
Elecfans高手问答 Q&;A——STM32问答2014-08-19 0
-
Elecfans高手问答 Q&;A——PCB问答2014-08-19 0
-
Elecfans高手问答Q&;A——DSP问答2014-08-20 0
-
Elecfans高手问答Q&;A——ARM问答2014-08-25 0
-
Elecfans高手问答Q&;A——STM32问答2014-09-04 0
-
锁相环常见Q&;A附件pdf2018-08-16 0
-
关于高级硬件在环(HIL)您想要了解的十个问题2022-12-21 1595
-
如何区分Java中的&和&&2023-02-24 1547
-
if(a==1 && a==2 && a==3),为true,你敢信?2023-05-08 1115
-
划重点!氪见激光雷达Q&;amp;amp;A合集,你想知道的都在这2022-08-26 1696
-
虹科方案 | 预测性维护无线振动监测方案Q&;amp;amp;A2023-05-15 764
全部0条评论

快来发表一下你的评论吧 !
