

 NVIDIA发布人形机器人重磅更新!Isaac GR00T Blueprint厉害在哪?
NVIDIA发布人形机器人重磅更新!Isaac GR00T Blueprint厉害在哪?
描述
电子发烧友网报道(文/吴子鹏)在备受瞩目的CES 2025上,NVIDIA在机器人领域宣布了重磅更新——Isaac GR00T Blueprint,帮助开发者更高效、高质量地打造人形机器人。同时,NVIDIA创始人兼CEO黄仁勋在CES 2025上还宣布了NVIDIA“人形机器人朋友圈”——NVIDIA将会在人形机器人领域和包括中国公司小鹏、宇树在内的科技公司开展合作,共同推动人形机器人产业发展。
在人形机器人开发领域,NVIDIA Isaac机器人开发平台得到了很多开发者的认可,成为这些开发者开发人形机器人的得力帮手。NVIDIA Isaac是一个由NVIDIA加速库、应用框架和AI模型组成的AI机器人开发平台,可加速自主移动机器人 (AMR)、机械手和机械臂以及人形机器人等AI机器人的开发。
NVIDIA Isaac包含了一系列的AI机器人开发工具和开发示例,其中参考应用NVIDIA Isaac Sim允许开发者在基于物理的虚拟环境中设计、模拟、测试和训练基于AI的机器人和自主机器。NVIDIA Isaac Sim基于NVIDIA Omniverse 构建,支持开发者构建自己的自定义模拟器或将核心Isaac Sim技术集成到现有测试和验证管线中。
随着Isaac GR00T Blueprint发布,NVIDIA Isaac平台的性能得到了进一步强化,Blueprint可帮助开发者生成海量的合成运动数据,以便通过模仿学习来训练人形机器人。如下图所示,Isaac GR00T Blueprint通过GR00T-Teleop、GR00T-Mimic和GR00T-Gen工具流能够帮助开发者高效完成人形机器人的模仿学习,可以更好地融入人类世界。

模仿学习也被称为基于演示的学习(Learning By Demonstration),主要强调的是通过大量的参考数据,让人形机器人等机器可以与环境进行交互。一般而言,模仿学习主要包括行为克隆(Behavior Cloning)和逆向强化学习(Inverse Reinforcement Learning),无论是哪种技术路径,都需要大量的数据作为参考,然而在真实世界中收集这些广泛、高质量的数据集既繁琐又耗时,而且成本往往高得令人却步。
Isaac GR00T Blueprint解决了这一痛点,开发者只需少量人类示范,就能轻松生成海量的合成数据集。在这个应用框架下,GR00T-Teleop用于借助虚拟现实设备捕捉人类演示动作,并生成金标准;GR00T-Mimic用于将捕捉到的示范生成更大的合成运动数据集;GR00T-Gen用于通过域随机化和3D提升技术,指数级扩增这个数据集。
黄仁勋表示:“与大型语言模型一样,世界基础模型是推进机器人和自动驾驶汽车(AV)开发的基础,但并非所有开发人员都有专业知识和资源来训练自己开发的方案。”“我们创建了Cosmos,以使物理AI更加普惠,并让每个开发人员都能接触到通用机器人技术。”
NVIDIA Cosmos是专为物理AI而构建的,据悉开发者可以基于NVIDIA Cosmos完成以下操作:
·视频搜索与理解:使开发者能够轻松从视频数据中找到特定的训练场景。例如,他们可以搜索描绘雪地道路状况或仓库拥堵情况的视频。
·基于物理仿真合成逼真数据:使用Cosmos模型在NVIDIA Omniverse平台上开发的3D场景中生成逼真的视频。
·物理AI模型的开发和评估:无论是在基础模型上构建自定义模型,还是测试其在特定模拟场景下的表现,都可以使用Cosmos进行强化学习以改进模型。
·预见和“多元宇宙”模拟:使用Cosmos和Omniverse生成AI模型可能出现的每一种可能结果,帮助其选择最佳和最准确的路径。
NVIDIA Cosmos的模型基于1800万亿个数据单元进行训练,其中包括200万小时的自动驾驶、机器人、无人机拍摄的视频以及合成数据。在人形机器人开发方面,NVIDIA Cosmos让数据稀缺性不再是人形机器人开发的关键挑战,开发者通过Cosmos上的文本、图像和视频到世界模型功能,就可以模拟各种逼真的任务场景,并完成人形机器人在这一场景下的训练学习。显然,NVIDIA Cosmos将显著缩短通用人形机器人的开发周期,让通用人形机器人早日普及。
NVIDIA已经宣布第一批采用NVIDIA Cosmos的生态伙伴,包括1X、Agile Robots、Agility、Figure AI、Foretellix、Fourier、Galbot、Hillbot、IntBot、Neura Robotics、Skild AI、Virtual Incision、Waabi和XPENG等人形机器人公司。
打开APP阅读更多精彩内容
Isaac GR00T Blueprint让模仿学习更高效
人形机器人是一个全球关注的科技热点,在中国市场,人形机器人是新质生产力的代表之一。统计数据显示,2023年全球人形机器人市场规模约为21.6亿美元,预计到2029年将达到324亿美元。到2035年,全球人形机器人的出货量可能超过100万台,达到140万台。在人形机器人开发领域,NVIDIA Isaac机器人开发平台得到了很多开发者的认可,成为这些开发者开发人形机器人的得力帮手。NVIDIA Isaac是一个由NVIDIA加速库、应用框架和AI模型组成的AI机器人开发平台,可加速自主移动机器人 (AMR)、机械手和机械臂以及人形机器人等AI机器人的开发。
NVIDIA Isaac包含了一系列的AI机器人开发工具和开发示例,其中参考应用NVIDIA Isaac Sim允许开发者在基于物理的虚拟环境中设计、模拟、测试和训练基于AI的机器人和自主机器。NVIDIA Isaac Sim基于NVIDIA Omniverse 构建,支持开发者构建自己的自定义模拟器或将核心Isaac Sim技术集成到现有测试和验证管线中。
随着Isaac GR00T Blueprint发布,NVIDIA Isaac平台的性能得到了进一步强化,Blueprint可帮助开发者生成海量的合成运动数据,以便通过模仿学习来训练人形机器人。如下图所示,Isaac GR00T Blueprint通过GR00T-Teleop、GR00T-Mimic和GR00T-Gen工具流能够帮助开发者高效完成人形机器人的模仿学习,可以更好地融入人类世界。
Isaac GR00T Blueprint应用框图
模仿学习也被称为基于演示的学习(Learning By Demonstration),主要强调的是通过大量的参考数据,让人形机器人等机器可以与环境进行交互。一般而言,模仿学习主要包括行为克隆(Behavior Cloning)和逆向强化学习(Inverse Reinforcement Learning),无论是哪种技术路径,都需要大量的数据作为参考,然而在真实世界中收集这些广泛、高质量的数据集既繁琐又耗时,而且成本往往高得令人却步。
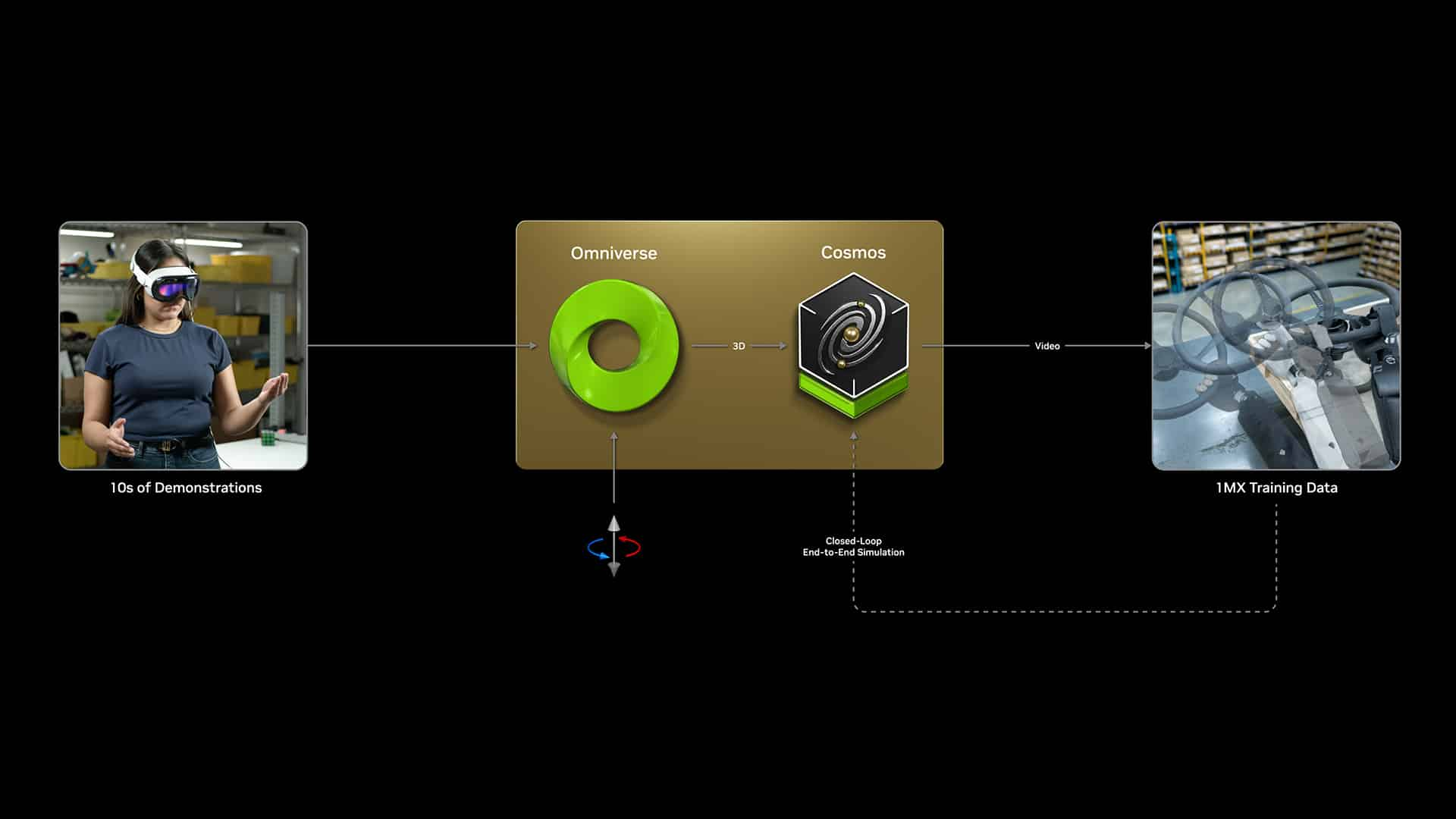
Isaac GR00T Blueprint解决了这一痛点,开发者只需少量人类示范,就能轻松生成海量的合成数据集。在这个应用框架下,GR00T-Teleop用于借助虚拟现实设备捕捉人类演示动作,并生成金标准;GR00T-Mimic用于将捕捉到的示范生成更大的合成运动数据集;GR00T-Gen用于通过域随机化和3D提升技术,指数级扩增这个数据集。
Isaac GR00T Blueprint融合了NVIDIA Cosmos
在Isaac GR00T Blueprint的GR00T-Gen工具流中,NVIDIA Omniverse和NVIDIA Cosmos是指数级扩增数据集的关键。NVIDIA Cosmos是NVIDIA在CES 2025上最新发布的“世界基础模型”,拥有一系列开放的预训练世界基础模型,专为生成具有物理感知的视频和物理AI开发所需的世界状态而设计。
NVIDIA Cosmos应用演示
黄仁勋表示:“与大型语言模型一样,世界基础模型是推进机器人和自动驾驶汽车(AV)开发的基础,但并非所有开发人员都有专业知识和资源来训练自己开发的方案。”“我们创建了Cosmos,以使物理AI更加普惠,并让每个开发人员都能接触到通用机器人技术。”
NVIDIA Cosmos是专为物理AI而构建的,据悉开发者可以基于NVIDIA Cosmos完成以下操作:
·视频搜索与理解:使开发者能够轻松从视频数据中找到特定的训练场景。例如,他们可以搜索描绘雪地道路状况或仓库拥堵情况的视频。
·基于物理仿真合成逼真数据:使用Cosmos模型在NVIDIA Omniverse平台上开发的3D场景中生成逼真的视频。
·物理AI模型的开发和评估:无论是在基础模型上构建自定义模型,还是测试其在特定模拟场景下的表现,都可以使用Cosmos进行强化学习以改进模型。
·预见和“多元宇宙”模拟:使用Cosmos和Omniverse生成AI模型可能出现的每一种可能结果,帮助其选择最佳和最准确的路径。
NVIDIA Cosmos的模型基于1800万亿个数据单元进行训练,其中包括200万小时的自动驾驶、机器人、无人机拍摄的视频以及合成数据。在人形机器人开发方面,NVIDIA Cosmos让数据稀缺性不再是人形机器人开发的关键挑战,开发者通过Cosmos上的文本、图像和视频到世界模型功能,就可以模拟各种逼真的任务场景,并完成人形机器人在这一场景下的训练学习。显然,NVIDIA Cosmos将显著缩短通用人形机器人的开发周期,让通用人形机器人早日普及。
NVIDIA已经宣布第一批采用NVIDIA Cosmos的生态伙伴,包括1X、Agile Robots、Agility、Figure AI、Foretellix、Fourier、Galbot、Hillbot、IntBot、Neura Robotics、Skild AI、Virtual Incision、Waabi和XPENG等人形机器人公司。
结语
Isaac GR00T Blueprint的推出解决了当前困扰人形机器人开发者的关键难题——如何获取海量数据完成人形机器人的模仿学习。通过整合GR00T-Teleop、GR00T-Mimic和GR00T-Gen工作流,Isaac GR00T Blueprint让开发者只需少量人类示范,就能轻松生成海量的合成数据集。在Isaac GR00T Blueprint应用框架下,最新发布的NVIDIA Cosmos则是数据指数级扩增的关键。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
-
NVIDIA AI机器人开发— NVIDIA Isaac Sim入门2022-10-19 1844
-
CES | NVIDIA 发布智能机器人高级模拟引擎 Isaac Sim 的重大更新2023-01-06 641
-
NVIDIA Isaac 平台先进的仿真和感知工具助力 AI 机器人技术加速发展2023-10-20 1022
-
使用 NVIDIA Isaac 仿真并定位 Husky 机器人2023-12-26 1366
-
英伟达发布人形机器人通用模型与Isaac机器人计划2024-03-19 666
-
NVIDIA发布一款人形机器人通用基础模型—Project GR00T2024-03-20 688
-
机器人掀起2024开年融资热潮,联想入场投资多家公司,人形机器人要“爆”2024-03-21 3736
-
英伟达发布人形机器人基础模型2024-03-21 788
-
NVIDIA入局人形机器人!Isaac平台迎来重要更新2024-03-26 1093
-
NVIDIA Isaac 机器人平台利用最新的生成式 AI 和先进的仿真技术,加速 AI 机器人技术的发展2024-06-04 7726
-
NVIDIA 加速人形机器人发展2024-07-30 752
-
《人形机器人产业地图(2024)》重磅发布!2024-12-02 712
-
借助NVIDIA Project GR00T加速人形机器人开发2024-12-02 478
-
物理仿真人形机器人的统一全身控制策略2025-01-06 122
-
NVIDIA推出Isaac GR00T Blueprint2025-01-09 111
全部0条评论

快来发表一下你的评论吧 !
