之前我们介绍了电机家族里结构最简单的直流有刷电机(Brushed DC Motor),只要给电刷两端通上电,就可以使其工作。
但是有刷电机有一个比较令人讨厌的缺点:那就是“吵”(noisy)。因为电刷和换向环需要时刻不停地摩擦,才能给电枢供电。所以,如果你想要一个“静音风扇”的话,肯定不能选使用了有刷电机的产品。
并且电刷使用时间久了,比较容易损坏。电流较大的时候,你甚至可以看到电刷在换向的时候噼里啪啦地冒火花,也是挺吓人的。而这些缺点,在下面将要介绍的直流无刷电机(Brushless DC Motor)里,一样都没有!
我们将从以下四个方面来给大家介绍直流无刷电机(以下简称BLDC):
1,BLDC的优缺点;
2,BLDC的工作原理;
3,BLDC的控制方式;
4,BLDC的实际使用。
/ BLDC的优缺点 /
直流无刷电机,从字面上看,其最大的特点,就是“无刷”,也就是没有电刷的意思。
就因为没有电刷,它非常完美地避开了有刷电机的那几个缺点。所以反过来说,它主要的优点就是:
1,寿命长;
2,能够做到静音;
3,效率高(损耗低);
4,体积较小;
5,稳定性高。
至于缺点,等我们了解它的工作原理和控制方式以后,自然而然就明白了。
/ BLDC的工作原理 /
BLDC是电机的一种,所以它最基本的构成也离不开定子(stator)和转子(rotor)。还记得有刷电机的基本结构吗?有刷电机的定子是永磁体,而它的转子,则是通电的线圈(绕组)。如下图:

但是对于BLDC来说,情况恰恰相反!
BLDC的定子(stator)是通电的线圈,而转子(rotor)却是永磁体!

从“麦克斯韦-安培定律”可以知道,通电线圈附近的空间会产生磁场。而磁场的分布方向,我们可以用“右手定则”得出。如下图:
其实这就是我们常说的“电磁铁”了!
那么接下来的事情就简单了,磁铁的特性是什么?估计小学生都会大声说出它的答案:
同性相斥,异性相吸!
所以,我们只要给定子上的线圈接入方向适当的电流,即让电磁铁的磁极方向和永磁体的磁极方向正好对应,不就能排斥、或者吸引转子做旋转运动了嘛。
上图就是按顺序单独给线圈通电,使其朝向转子的方向为电磁铁的S极,吸引转子顺时针方向旋转
这个转子像不像一头正在拉磨的驴,一直被前面的胡萝卜(定子)所吸引,最终一刻不停地往前走呢?
* 定子的优化 *
以上的驱动方式,即按顺序单独给每个线圈通电,虽然可行,但是未免太过繁琐,效率低下。因此,实际上的BLDC会将那六个线圈两两组合,分成A,B,C三个绕组,如下图:
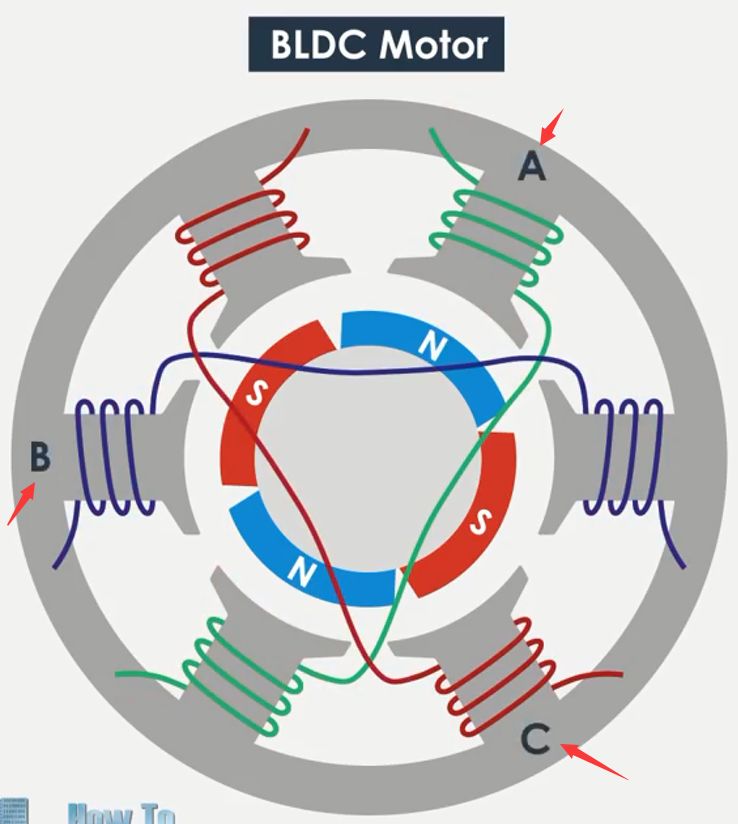
这样我们就可以同时驱动两个电磁铁了,效率立马提高了一倍,有没有!
但是这还只是用了磁铁“吸引”的特性,别忘了磁铁还有“排斥”的特性。
如果我们再同时驱动另外一组线圈,让上一组线圈“吸引”转子的时候,另外一组线圈“排斥”转子,那么我们的转子将会获得更高的驱动力!如下图:
到目前为止,相信你已经对BLDC的工作原理有了比较深入的了解。这个模型已经开始接近实际的BLDC产品了。
但是对于上面的模型,我们需要给两个绕组同时提供方向相反的两组电源,才能同时达到“吸引”和“排斥”的效果。这对于实际应用来讲,未免过于复杂,成本也太高。
接下来我们要讲的“BLDC的控制方式”章节,将会解决上面这个问题。
/ BLDC的控制方式 /
原来的A,B,C三个绕组是各自独立的,因此控制起来非常麻烦。那如果我们把A,B,C三个绕组接在一起,拼成一个“星形连接(star arrangement)”,结果会是怎么样?

本来三个绕组,引出六根线;现在引出的线减少到只有三根线,那么这么接怎么实现跟六根线一样的控制效果呢?如下图:
电源正极接在右上角的A绕组输入,而电源的负极接在了左下角的B绕组输出。这个时候A绕组和B绕组同时被驱动,而且其极性正好相反,实现了三个绕组独立驱动时一样的效果!
所以只要按照这个顺序:AB-AC-BC-BA-CA-CB,这六个节拍,依次循环驱动定子的绕组,转子就能一直旋转下去!
可以使用六个电子开关来实现这六个节拍的驱动,如下图:
* 位置检测 *
我们虽然已经知道了控制转子的六个节拍的方法。但是你有没有发现一个新的问题:如果不知道转子的位置,如何知道何时该驱动哪个绕组?所以我们必须要知道转子的当前位置!
而转子的位置检测,一般有两种方式:
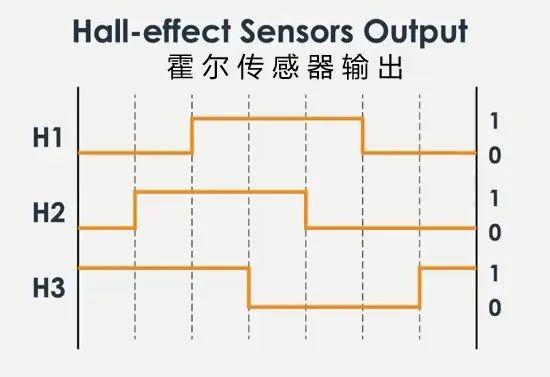
1,霍尔传感器检测法;
如下图,在定子里放上H1,H2,H3,三个霍尔传感器,就可以知道当前的定子的确切位置。

霍尔传感器的输出用高低电平来表示:
2,反向电动势检测法;
反向电动势(Back EMF)检测法是基于电磁感应原理:当没有通电的绕组周围的磁场(磁通量)改变时,会在这个绕组上感应出一个电动势,我们只要检测这个电动势的大小和方向,也能知道当前定子的位置。

这两种检测方式各有优缺点:霍尔传感器检测精度更高一点,但是成本也较高;相反,反向电动势检测法经济性更好,但是精度稍低。
* 内转子 or 外转子 *
BLDC有两种结构:转子在内的叫做内转子BLDC;相反,转子在外的叫做外转子BLDC。
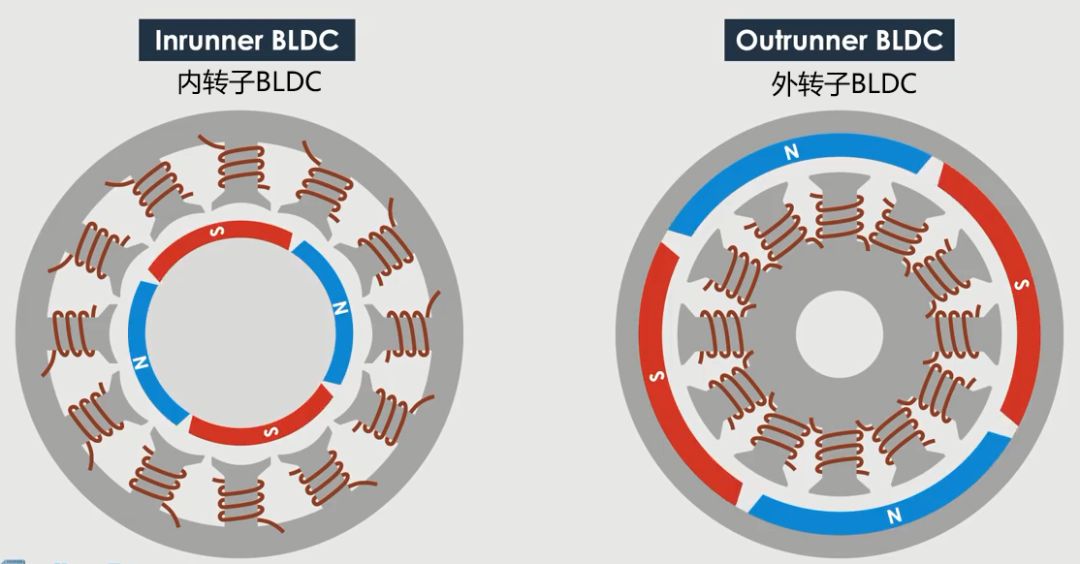
相对来说,外转子BLDC应用更多一点。主要原因是外转子BLDC在机械结构上更稳定。
这是因为电机转子在高速运行下,由于离心力的作用,会有向外扩张的趋势。所以内转子BLDC需要非常高的机械精度,保证转子和定子不会打架。但是如果预留的距离太远,又会导致漏磁而影响电机的整体效率。
但是在外转子BLDC上却没有这个问题,因为外转子天然不受扩张影响。
/ BLDC的缺点 /
我们现在再回到前面遗留下的问题:BLDC的缺点是什么?相信聪明的你已经可以猜到:我们花了那么多的篇幅来讲BLDC的控制方式,足以看到其控制的难度,相对于有刷电机来说,是高出了不少的!
所以说BLDC最大的缺点,就是他的控制难度高,驱动电调(Electronic Speed Control,简称ESC)价格较高。
它还有一个缺点,就是BLDC由于感抗的原因,启动时会伴随着抖动,不像有刷电机的启动那么平稳。
综上所述,有刷电机和BLDC各有优缺点,都不是完美的。如何选择要视具体的应用场景而定。那接下来我们就来看看,BLDC的实际应用场景吧。
/ BLDC的实际应用 /
1,静音散热风扇
风冷是很多设备散热的首选。例如市面上很多主打“静音”的机箱,如果是使用风冷,里面的散热风扇基本都是使用BLDC。
用来给笔记本电脑散热的底座也常用BLDC:
除此之外,一些大型的通风散热系统里面,使用的也是BLDC风扇。
2,电动四轴/多轴无人机
大部分较大功率的电动四轴/多轴无人机使用的都是BLDC,适配上合适的电调(ESC),再使用PWM来控制BLDC调速是非常方便的。
3,电动工具
国内生产的电扳手基本上都使用了BLDC,还有大部分的手电钻也一样。主要是因为BLDC的高效率,而使得电池供电的电动工具续航时间更长。还有一点是无刷电机的扭矩输出非常稳定,如下图:

这是其他类型的电机很难做到的一个特点。
除了以上三类以外,还有冰箱压缩机,冰柜冷却风机,以及近几年很火的空气净化器、吸尘器/扫地机器人等,使用的都是BLDC驱动。
/ 结语 /
以上就是今天要介绍的无刷电机BLDC的全部内容了。当然,这里只是一个非常基本的介绍,如果想要完美地控制一个BLDC工作起来,还需要小伙伴们继续不断地深入学习。
之前我们介绍了电机家族里结构最简单的直流有刷电机(Brushed DC Motor),只要给电刷两端通上电,就可以使其工作。
但是有刷电机有一个比较令人讨厌的缺点:那就是“吵”(noisy)。因为电刷和换向环需要时刻不停地摩擦,才能给电枢供电。所以,如果你想要一个“静音风扇”的话,肯定不能选使用了有刷电机的产品。
并且电刷使用时间久了,比较容易损坏。电流较大的时候,你甚至可以看到电刷在换向的时候噼里啪啦地冒火花,也是挺吓人的。而这些缺点,在下面将要介绍的直流无刷电机(Brushless DC Motor)里,一样都没有!
我们将从以下四个方面来给大家介绍直流无刷电机(以下简称BLDC):
1,BLDC的优缺点;
2,BLDC的工作原理;
3,BLDC的控制方式;
4,BLDC的实际使用。
/ BLDC的优缺点 /
直流无刷电机,从字面上看,其最大的特点,就是“无刷”,也就是没有电刷的意思。
就因为没有电刷,它非常完美地避开了有刷电机的那几个缺点。所以反过来说,它主要的优点就是:
1,寿命长;
2,能够做到静音;
3,效率高(损耗低);
4,体积较小;
5,稳定性高。
至于缺点,等我们了解它的工作原理和控制方式以后,自然而然就明白了。
/ BLDC的工作原理 /
BLDC是电机的一种,所以它最基本的构成也离不开定子(stator)和转子(rotor)。还记得有刷电机的基本结构吗?有刷电机的定子是永磁体,而它的转子,则是通电的线圈(绕组)。如下图:
但是对于BLDC来说,情况恰恰相反!
BLDC的定子(stator)是通电的线圈,而转子(rotor)却是永磁体!
从“麦克斯韦-安培定律”可以知道,通电线圈附近的空间会产生磁场。而磁场的分布方向,我们可以用“右手定则”得出。如下图:
其实这就是我们常说的“电磁铁”了!
那么接下来的事情就简单了,磁铁的特性是什么?估计小学生都会大声说出它的答案:
同性相斥,异性相吸!
所以,我们只要给定子上的线圈接入方向适当的电流,即让电磁铁的磁极方向和永磁体的磁极方向正好对应,不就能排斥、或者吸引转子做旋转运动了嘛。
上图就是按顺序单独给线圈通电,使其朝向转子的方向为电磁铁的S极,吸引转子顺时针方向旋转
这个转子像不像一头正在拉磨的驴,一直被前面的胡萝卜(定子)所吸引,最终一刻不停地往前走呢?
* 定子的优化 *
以上的驱动方式,即按顺序单独给每个线圈通电,虽然可行,但是未免太过繁琐,效率低下。因此,实际上的BLDC会将那六个线圈两两组合,分成A,B,C三个绕组,如下图:
这样我们就可以同时驱动两个电磁铁了,效率立马提高了一倍,有没有!
但是这还只是用了磁铁“吸引”的特性,别忘了磁铁还有“排斥”的特性。
如果我们再同时驱动另外一组线圈,让上一组线圈“吸引”转子的时候,另外一组线圈“排斥”转子,那么我们的转子将会获得更高的驱动力!如下图:
到目前为止,相信你已经对BLDC的工作原理有了比较深入的了解。这个模型已经开始接近实际的BLDC产品了。
但是对于上面的模型,我们需要给两个绕组同时提供方向相反的两组电源,才能同时达到“吸引”和“排斥”的效果。这对于实际应用来讲,未免过于复杂,成本也太高。
接下来我们要讲的“BLDC的控制方式”章节,将会解决上面这个问题。
/ BLDC的控制方式 /
原来的A,B,C三个绕组是各自独立的,因此控制起来非常麻烦。那如果我们把A,B,C三个绕组接在一起,拼成一个“星形连接(star arrangement)”,结果会是怎么样?
本来三个绕组,引出六根线;现在引出的线减少到只有三根线,那么这么接怎么实现跟六根线一样的控制效果呢?如下图:
电源正极接在右上角的A绕组输入,而电源的负极接在了左下角的B绕组输出。这个时候A绕组和B绕组同时被驱动,而且其极性正好相反,实现了三个绕组独立驱动时一样的效果!
所以只要按照这个顺序:AB-AC-BC-BA-CA-CB,这六个节拍,依次循环驱动定子的绕组,转子就能一直旋转下去!
可以使用六个电子开关来实现这六个节拍的驱动,如下图:
* 位置检测 *
我们虽然已经知道了控制转子的六个节拍的方法。但是你有没有发现一个新的问题:如果不知道转子的位置,如何知道何时该驱动哪个绕组?所以我们必须要知道转子的当前位置!
而转子的位置检测,一般有两种方式:
1,霍尔传感器检测法;
如下图,在定子里放上H1,H2,H3,三个霍尔传感器,就可以知道当前的定子的确切位置。
霍尔传感器的输出用高低电平来表示:
2,反向电动势检测法;
反向电动势(Back EMF)检测法是基于电磁感应原理:当没有通电的绕组周围的磁场(磁通量)改变时,会在这个绕组上感应出一个电动势,我们只要检测这个电动势的大小和方向,也能知道当前定子的位置。
这两种检测方式各有优缺点:霍尔传感器检测精度更高一点,但是成本也较高;相反,反向电动势检测法经济性更好,但是精度稍低。
* 内转子 or 外转子 *
BLDC有两种结构:转子在内的叫做内转子BLDC;相反,转子在外的叫做外转子BLDC。
相对来说,外转子BLDC应用更多一点。主要原因是外转子BLDC在机械结构上更稳定。
这是因为电机转子在高速运行下,由于离心力的作用,会有向外扩张的趋势。所以内转子BLDC需要非常高的机械精度,保证转子和定子不会打架。但是如果预留的距离太远,又会导致漏磁而影响电机的整体效率。
但是在外转子BLDC上却没有这个问题,因为外转子天然不受扩张影响。
/ BLDC的缺点 /
我们现在再回到前面遗留下的问题:BLDC的缺点是什么?相信聪明的你已经可以猜到:我们花了那么多的篇幅来讲BLDC的控制方式,足以看到其控制的难度,相对于有刷电机来说,是高出了不少的!
所以说BLDC最大的缺点,就是他的控制难度高,驱动电调(Electronic Speed Control,简称ESC)价格较高。
它还有一个缺点,就是BLDC由于感抗的原因,启动时会伴随着抖动,不像有刷电机的启动那么平稳。
综上所述,有刷电机和BLDC各有优缺点,都不是完美的。如何选择要视具体的应用场景而定。那接下来我们就来看看,BLDC的实际应用场景吧。
/ BLDC的实际应用 /
1,静音散热风扇
风冷是很多设备散热的首选。例如市面上很多主打“静音”的机箱,如果是使用风冷,里面的散热风扇基本都是使用BLDC。
用来给笔记本电脑散热的底座也常用BLDC:
除此之外,一些大型的通风散热系统里面,使用的也是BLDC风扇。
2,电动四轴/多轴无人机
大部分较大功率的电动四轴/多轴无人机使用的都是BLDC,适配上合适的电调(ESC),再使用PWM来控制BLDC调速是非常方便的。
3,电动工具
国内生产的电扳手基本上都使用了BLDC,还有大部分的手电钻也一样。主要是因为BLDC的高效率,而使得电池供电的电动工具续航时间更长。还有一点是无刷电机的扭矩输出非常稳定,如下图:
这是其他类型的电机很难做到的一个特点。
除了以上三类以外,还有冰箱压缩机,冰柜冷却风机,以及近几年很火的空气净化器、吸尘器/扫地机器人等,使用的都是BLDC驱动。
/ 结语 /
以上就是今天要介绍的无刷电机BLDC的全部内容了。当然,这里只是一个非常基本的介绍,如果想要完美地控制一个BLDC工作起来,还需要小伙伴们继续不断地深入学习。

 举报
举报




