 实现ARM+ROS(机器人操作系统)之运行ROS!
实现ARM+ROS(机器人操作系统)之运行ROS!
如何低成本搭建ARM+ROS的硬件载体?上文展示ROS部署前的筹备工作及步骤分解,本文将为大家演示ROS的移植及测试方法。
1. 准备工作
经过前面的环境搭建,HDG2L-IoT评估套件已经能稳定地运行Ubuntu+docker环境,当前需要下载运行ROS镜像即可。
本文参考ROS官方文档《Getting started with ROS and Docker》,结合我司的HDG2L-IoT评估套件实现ROS方案完全搭建流程,参考网址如下所示。

2. 选择ROS镜像
目前docker官网提供了搭建好的ROS镜像(支持arm64架构),网址为:

如下所示。
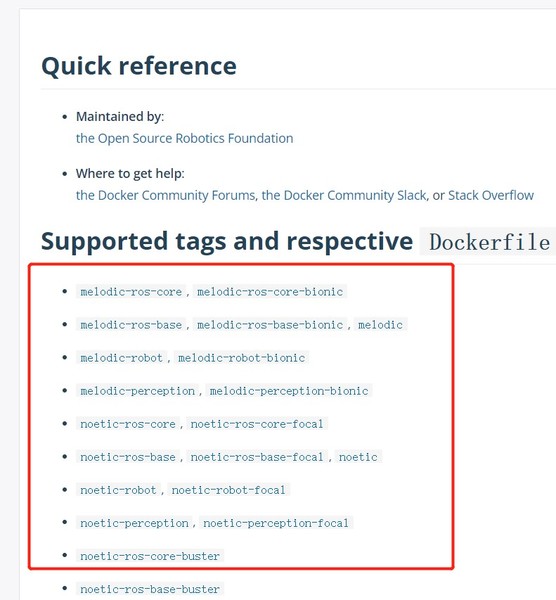
下载命令如下所示,填入上图的字符串。

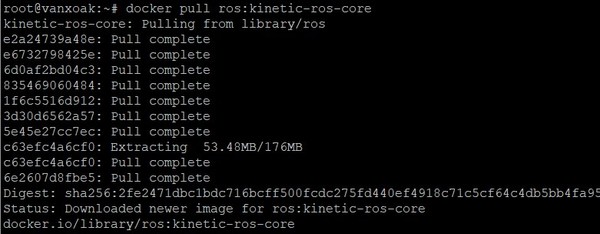
3. 下载ROS镜像
根据项目需求选择合适的ROS镜像,本例以kinetic-ros-core为例,下载命令如下所示。

下载完成如下图所示:
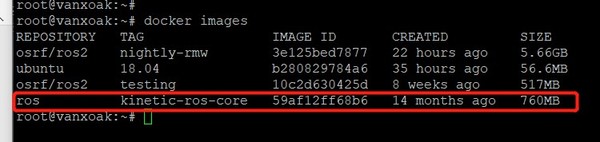
查看镜像的命令:

4. 运行ROS容器
使用下载下来的ROS镜像来启动容器,命令如下所示。

以终端模式进入ROS容器。
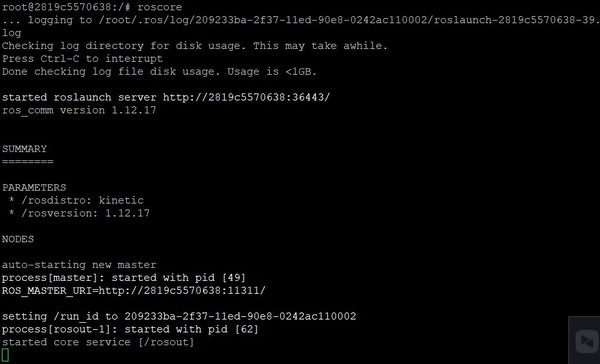
5. 启动ROS应用
进入后运行roscore来启动运行ros节点必要的ROS Master和ROS parameter,运行情况如下所示。
至此,我们通过三篇文章从硬件与底层、环境搭建、ROS运行等方面为大家介绍了一个全新的ARM+ROS的软硬件实现方案。文章中若有不明之处或需要技术问题交流请随时联系万象奥科官方。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ARM开发
+关注
关注
0文章
36浏览量
9572
发布评论请先 登录
相关推荐
ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
12月7日-8日,为期两天的ROSCon China 2024在上海圆满落幕,来自全球的ROS专家学者、开发者、企业代表齐聚一堂,共享机器人前沿技术成果。地瓜机器人携手众多RDK生态产品亮相,并联手古月居共同推出首本基于RDK

ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
12月7日-8日,为期两天的ROSCon China 2024在上海圆满落幕,来自全球的ROS专家学者、开发者、企业代表齐聚一堂,共享机器人前沿技术成果。地瓜机器人携手众多RDK生态产品亮相,并联
发表于 12-10 10:56
•192次阅读
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的
发表于 07-09 11:38
米尔瑞米派集聚5种操作系统,兼顾学习开发和项目产品需要的派
灵活、可靠且高效的机器人系统。ROS 2在瑞米派平台上的应用提供了许多关键功能和优势。首先,ROS 2采用了一种分布式架构,支持多个节点以及节点间的通信。这使得不同的模块可以并行
发表于 07-05 17:26

国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享
一、实验目的
本实验通过TL3568-PlusTEB教学实验箱修改机械臂不同舵机的角度,增加延迟时间,从而做到机械臂跳舞的效果。
二、实验原理
ROS(机器人操作系统)
ROS(
发表于 06-28 14:37
用悟空派全志H3开发板做一个基于ROS系统的全向轮小车
算:
5、总结
悟空派H3开发板在ROS系统下构建全向轮小车的试用中表现出色。
其强大的硬件性能、ROS支持和控制操作性能使其成为机器人开发
发表于 05-06 11:15
基于鸿道(Intewell®)操作系统研发的农业机器人操作系统
江苏大学与科东软件联合研发“农业机器人操作系统”,并成立“农业机器人操作系统”联合实验室,奋力推进农业智能化,推动农业科技创新。“农业机器人
ZMC900E控制器之ROS2环境安装指南
ZMC900E是致远电子研发的最新一代高性能EtherCAT控制器,支持ROS2系统,兼备强大功能和实时性,为工业应用带来新的可能。本文将详述ROS2特点和安装,助力用户在机器人上的二

ROS机器人操作系统的实现原理
面对序列化,很多人心中可能会有很多疑问。 首先,为什么要序列化?或者更具体的说,既然对象的信息本来就是以字节的形式储存在内存中,那为什么要多此一举把一些字节数据转换成另一种形式的、一维的、连续的字节数据呢?

实现机器人操作系统——ADI Trinamic电机控制器ROS1驱动程序简介
摘要 机器人操作系统(ROS)驱动程序基于ADI产品而开发,因此可直接在ROS生态系统中使用这些产品。本文将概述如何在应用、产品和

SLAMWARE ROS SDK的基础架构、部署方法和应用示例介绍
ROS作为机器人行业应用最广泛的基础架构之一,是很多用户开发机器人应用的首选框架,如果要在基于ROS开发的系统中集成思岚科技的

工业控制:鸿道(Intewell)操作系统工业机器人控制解决方案
鸿道(Intewell)操作系统作为核心基础软件,构建机器人控制系统的底层技术平台。系统支持Linux/Windows的实时扩展,设备上可同时运行
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
请问一下,百度文库资料里面,下图所示的系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?与前面4GB版本的镜像有什么区别?
发表于 03-01 23:06
【youyeetoo X1 windows 开发板体验】基于ROS开发的LIO系统——项目计划+前言开箱
,来实现SLAM系统设计;
现如今window,也在不断完善自身生态,也在2018年将机器人领域著名的ROS系统,从window10开始兼容
发表于 01-26 17:58





 工商网监
工商网监
评论