
资料下载


×
一种基于多智能体协同强化学习的多目标追踪方法
消耗积分:0 |
格式:rar |
大小:1.19 MB |
2021-03-17
分享资料个
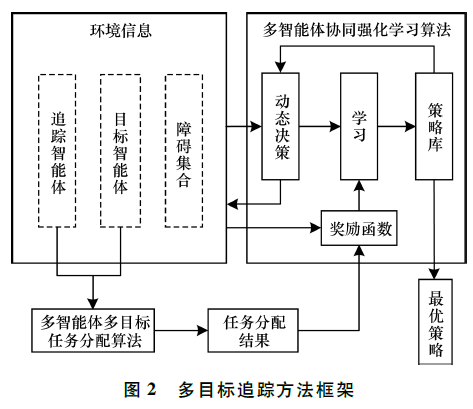
针对现有多目标追踪方法通常存在学习速度慢、追踪效率低及协同追踪策略设计困难等问题,提岀一种改进的多目标追踪方法。基于追踪智能体和目标智能体数量及其环境信息建立任务分配模型,运用匈牙利算法根据距离效益矩阵对其进行求解得到多个追踪智能体的任务分配情况,并以缩短目标智能体的追踪路径为优化目标进行任务分工,同时利用多智能体协同强化学习算法使多个智能体在相同环境中不断重复执行探索-积累-学习-决策过程,最终根据经验数据更新策略完成多目标追踪任务。仿真结果表明,与DDPG和 MADDPG方法相比,该方法能在避免碰撞和躲避障碍物的情况下,使多个智能体通过相互协作形成针对多个运动目标的最短追踪路线。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




